Содержание
Хочу стать инженером и собрать робота. У меня получится? — Нож
Хочу стать инженером и собрать робота. У меня получится? — Нож
Можно подумать, что робототехника — занятие для умников и выпускников физтеха, но это не так. На самом деле простых роботов строят даже младшие школьники, поэтому вам это тоже под силу. Вместе с благотворительным фондом Олега Дерипаски «Вольное дело», реализующим программу по робототехнике для школьников, подростков и студентов, мы сделали простой гид для начинающих инженеров (впрочем, взрослым он тоже вполне может пригодиться). Объясняем, как собрать своего первого робота.
ПоделитьсяРепостнутьТвитнуть
Что мне потребуется?
В первую очередь — микроконтроллер. Он станет мозгом будущего робота. Можно сказать, что микроконтроллер — это крошечный компьютер, размещенный на одной микросхеме. У него есть процессор, оперативная и постоянная память и даже периферийные устройства: интерфейсы ввода и вывода данных, различные таймеры, передатчики, приспособления, которые инициируют работу двигателей. Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.
Набор устройств зависит от конкретной модели. Именно микроконтроллер будет получать информацию от внешнего мира через датчики движения, фотокамеры и прочие приспособления, анализировать ее и побуждать робота совершать в ответ какие-то действия.
Микроконтроллер нужно будет установить на печатную плату, запитать его, подсоединить все необходимые устройства (датчики, лампочки, двигатели), а еще собрать из подручных материалов корпус робота. Все детали, которые для этого нужны, можно купить в любом магазине радиотехники.
Если у вас нет профильного образования или опытного наставника, который подробно объяснит, что именно и в какой последовательности устанавливать (и как пользоваться паяльником!), готовьтесь к долгой и кропотливой работе: придется перерыть интернет вдоль и поперек и испортить множество деталей.
Я в ужасе и собираюсь передумать. Нельзя попроще?
Можно. Специально для тех, кто никогда не держал в руках паяльник, но очень хочет попробовать себя в робототехнике, существуют специальные наборы-конструкторы, позволяющие сделать всё то же самое, но быстрее. Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Самый известный и популярный — Arduino. Его главное преимущество в том, что это не просто игрушка, а целая экосистема: множество обучающих материалов и инструкций, видеокурсы, огромное пользовательское комьюнити — можно задать любой вопрос от новичкового до самого продвинутого. Есть и другие платформы — например, совсем простой конструктор Mindstorms от Lego.
Составы наборов могут быть очень разными, но в каждом есть готовая печатная плата с уже установленным микроконтроллером и всеми дополнительными деталями, которые нужны для решения простых типовых задач. Обычно плату можно напрямую подключить к компьютеру через USB. А дальше среда разработки от производителя поможет сразу же сделать первые шаги в программировании роботов. Например, заставить мигать лампочку на плате.
Теперь всё зависит от вас. Можно, используя готовую плату, реализовать собственный несложный проект: например, сделать машинку, которая движется и останавливается по команде, или гирлянду для новогодней елки. Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Можно купить набор, уже включающий в себя всё, что нужно для постройки робота определенного типа, и потренироваться на нем. Плюс этого варианта: все детали в наборе подготовлены так, чтобы вы могли соединить их без паяльника или других инструментов.
Участники программы «Робототехника», которую поддерживает фонд Олега Дерипаски «Вольное дело», уже через несколько лет обучения могут создавать куда более сложные проекты и придумывают инженерные решения для самых разных задач. Например, разрабатывают системы для автоматической сортировки мусора. Если вам кажется, что всё это очень сложно, вы правы, но научиться этому может каждый.
У меня в школе была двойка по физике, и вообще я гуманитарий. Мне нужно что-то выучить, прежде чем приступать?
Штурмовать учебники необязательно. Конечно, школьная физика пригодилась бы, но если вы ее забыли, не переживайте — вспомните по ходу дела. Для начала просто погуглите, что такое ток, сопротивление, закон Ома, конденсатор, транзистор — пара десятков статей дадут вам базовые представления о радиотехнике, и этого хватит на первое время. Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
Позже вы легко найдете в сети всю информацию, которая вам понадобится. И усвоите ее на практике — гораздо лучше, чем из учебника.
А программировать надо уметь?
Если умеете, создание первого робота окажется, возможно, даже слишком легким делом. Если не умеете — отличный повод научиться. Дело в том, что программирование робота — штука очень наглядная: вот вы написали код и сразу же загорелась лампочка. Вам нужно, чтобы ваш робот разворачивался, когда до стены осталось меньше 5 см, значит, в программе надо прописать такое условие, всё логично. Именно поэтому детей часто начинают учить программированию на примере робототехники: здесь вместо скучных абстракций сразу получается осязаемый результат в реальном мире. На этом принципе строится обучение по программе «Робототехника». Все участники сразу же могут применить полученные знания на практике.
Перед первой попыткой написать программу для робота достаточно разобраться, что такое цикл и условный оператор. Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Для тех, кому и это кажется слишком сложным, производители конструкторов часто предусматривают визуальные редакторы: там код вообще не нужно писать, всё настраивается перетаскиванием блоков мышкой. Конечно, никакого сложного функционала так не напрограммируешь, но это уже начало. Позже, если захотите заниматься робототехникой углубленно, полезно будет освоить язык С, который чаще всего используется в этой сфере.
Меня случайно не убьет током?
Нет. Если, конечно, вы не собираетесь начать сразу с постройки огромных промышленных роботов. Пока речь идет о небольших игрушках, сила тока и напряжение настолько малы, что даже если вас и ударит, то вы ничего не почувствуете. Самое страшное, что можно сотворить, конструируя маленького робота, — небольшой взрыв на столе. Но это случится, только если вы перепутаете «плюс» с «минусом» во время работы с электролитическим конденсатором.
Самая вероятная неприятность — некоторое количество испорченных деталей, которые вы попытаетесь подсоединить не так и не туда.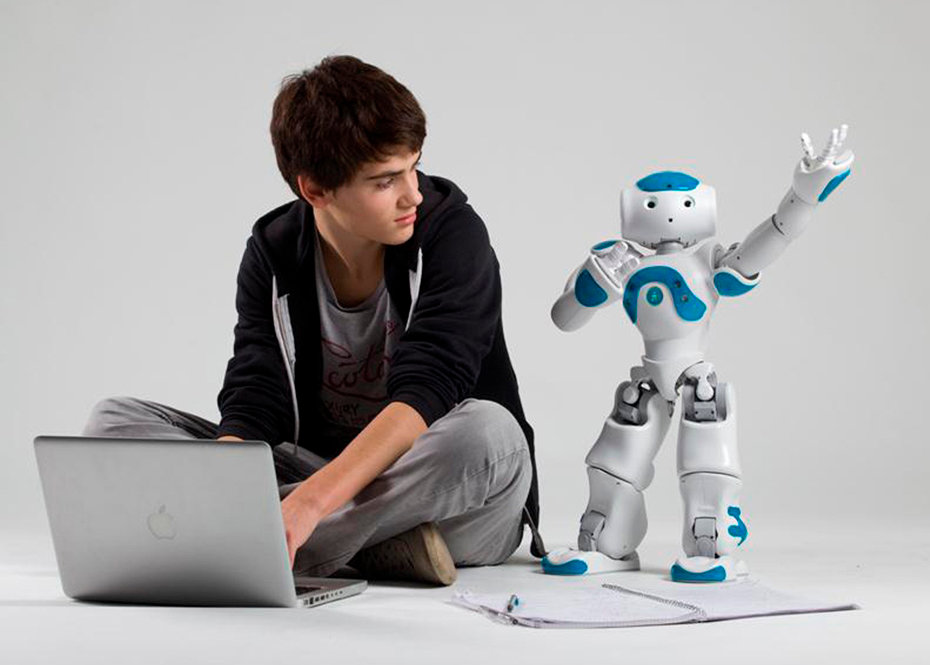 Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Но переживать не стоит: все необходимые расходники недороги, а их поломка тоже важная часть обучения.
Мой робот сможет защитить меня от врагов? Ну или хотя бы тапочки принести?
Самый первый — вряд ли. Точнее, нет ничего невозможного, но для начала лучше поставить перед собой цель попроще. Например, на базе того же Arduino можно собрать самых разных движущихся роботов: они могут ездить просто вперед-назад, по сложной заданной траектории или по нарисованной линии. Робот, который самостоятельно объезжает препятствия или как-то еще меняет свое поведение при приближении к разным объектам, тоже посильная задача. Еще первый робот вполне сможет включать и выключать что-нибудь, ориентируясь на уровень освещенности, совершать какие-то действия в определенный момент, заданный таймером, или по нажатию кнопки.
Ну а в будущем, если продолжите заниматься робототехникой, сможете сделать и робота-помощника, и робота-охранника, который умеет стрелять. Еще можно собрать робот-пылесос собственной модели. В России и в мире постоянно проводятся соревнования по робототехнике, на которых роботы-участники сражаются, играют в футбол, участвуют в гонках и просто демонстрируют свои выдающиеся способности. Например, на «РобоФесте», который ежегодно организует фонд «Вольное дело», можно увидеть сотни разных роботов.
В России и в мире постоянно проводятся соревнования по робототехнике, на которых роботы-участники сражаются, играют в футбол, участвуют в гонках и просто демонстрируют свои выдающиеся способности. Например, на «РобоФесте», который ежегодно организует фонд «Вольное дело», можно увидеть сотни разных роботов.
Умение собирать роботов как-то пригодится мне в жизни?
Да, еще как. Вы неизбежно научитесь программировать. Причем будете в состоянии не просто писать код, который что-то как-то делает, но и понимать всю цепочку, по которой набранные вами на клавиатуре символы преобразуются в действия целого механизма. Уметь программировать в наше время почти так же полезно, как знать английский язык: пригодится, даже если вы маркетолог или продавец мороженого.
Знание робототехники при желании позволит вам здорово усовершенствовать быт и даже сделать свое жилище «умным», не покупая дорогих готовых решений. Световой будильник? Запросто. Лампы с датчиками движения? Да легко. Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Чайник, который начинает кипятиться, получив СМС, и передает кондиционеру сигнал охлаждать, а пылесосу пылесосить? Не так легко, но вполне реализуемо.
Где можно узнать больше о роботах?
Можно пройти один из многочисленных, в том числе совершенно бесплатных онлайн-курсов. Можно выбрать курс, посвященный Arduino, — как, например, этот от МФТИ, или начать с Lego. А можно не привязываться к конкретной платформе и учиться робототехнике в целом — например, на этом курсе от Бауманки. Ну а если вы знаете английский, буквально вся Coursera с программами по робототехнике от ведущих мировых университетов к вашим услугам.
А если мне понравится и я захочу сделать это своей профессией? Куда податься?
Самое очевидное решение — в программисты. Причем не обязательно туда, где работают непосредственно с «железом»: навыки, полученные во время занятий робототехникой, пригодятся в любой сфере — от промышленного до веб-программирования.
Если возникнет желание связать свою дальнейшую судьбу именно с роботами, придется получить соответствующее высшее образование. Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Специальность «Робототехника и мехатроника» уже появилась во многих технических вузах — в Москве это МГТУ имени Баумана, МИФИ, МЭИ, МИРЭА. Подойдет и факультет радиотехники: большинство нынешних специалистов по робототехнике получали именно такое образование.
Специальный проект Фонда «Вольное дело» Дерипаски и Журнала «Нож»
Партнерский материал
Фонд «Вольное дело»
«Следуй за мной, если хочешь выжить». Послание — человеку, от его творения — робота
Однажды, не пройдёт и 30 лет, мы незаметно перестанем быть самыми умными на Земле (Джеймс Макалир)
Робот — Кто ты? Что ты? Ты ли?
Андроид, кобот, терминатор, носитель искусственного интеллекта, механический протез, автомат, машина. Помощник или Мессия? Предатель или Друг? Соперник или Чадо, творение рук человеческих?
Терминаторы — переходная ступень. Это получеловек, полумашина. Внутри него легкосплавное боевое шасси, под микропроцессорным контролем. Бронированное, очень прочное. А снаружи живая человеческая ткань: плоть, кожа, волосы, кровь. Творение киборгов (Из к/ф «Терминатор»).
Внутри него легкосплавное боевое шасси, под микропроцессорным контролем. Бронированное, очень прочное. А снаружи живая человеческая ткань: плоть, кожа, волосы, кровь. Творение киборгов (Из к/ф «Терминатор»).
Пожалуй, в сверхзвуковом мире, взлетающего с полосы 21 века, уже нет человека, не знакомого с понятием «робот». Впрочем, не всем известно, что «робот» как словесное обозначение — довольно молод. Робота придумал в 1920 году чешский драматург Карел Чапек. По-чешски слово «робот» означает «тяжелая нудная работа», а по-словацки — просто «труд».
R.U.R. Rossum’s Universal Robots. Дата написания: 1920. Дата первой публикации: 1921
R.U.R. (сокращение от чешского Rossumovi univerzální roboti, «Россумские универсальные роботы») — научно—фантастическая пьеса, автор Карел Чапек
Идея «механического существа» с давних пор захватывает воображение человека. По тем или иным соображениям затея создания некоего протеза — право, не нова. Протезирование собственных возможностей, механизмов психики и разума, даже просто механической составляющие и анатомических элементов «трансцендентно-материальной конструкции человек» — подход столь же смелый и яркий, как и искра сознания человеческого рода.
Протезирование собственных возможностей, механизмов психики и разума, даже просто механической составляющие и анатомических элементов «трансцендентно-материальной конструкции человек» — подход столь же смелый и яркий, как и искра сознания человеческого рода.
Железный дровосек из Волшебной страны, роботы-дети из «Искусственного интеллекта» Спилберга, роботы-убийцы из «Терминатора» — машины, способные думать и действовать, как люди. Эти «герои» неплохо известны благодаря упорным усилиям красочного мирового кинематографа и особенно Голливуда. Однако не стоит намеренно «омолаживать» роботов — их прототипы, выступающие протезами человеческого естества — известны с древних времён.
Вероятно, человек всегда желал обрести помощника. Стремление, подтверждаемое, в первую очередь, богатой мировой мифологемой Как вам глиняный гигант Мёккуркальви из скандинавской мифологии? Говорят, тот был троллем. А Голем из еврейских легенд? Или Галатея из мифа о Пигмалионе? Всех трёх незримо объединяет одно: перед нами — искусственные создания.
А почему бы не найти такого помощника, что был бы похож на него самого? На «Венец творения неведомой силы» — самоё Человека?
Согласно исследованиям знаменитого японского эксперта в робототехнике, Эйдзи Накано («Введение в робототехнику» — 1988 г.) упоминание о «живых» существах, созданных руками человека — и своим внешним видом и поведением напоминающих людей или каких-либо живых существ, можно встретить во многих древних мифах и легендах.
«Если тщательно проанализировать легенды и мифы о рукотворных механических существах, нетрудно заметить, что по существу, речь идет либо о существах, наделенных фантастической физической силой, способных летать, жить под землей и под водой, либо о существах, беспрекословно подчиняющихся человеку и выполняющих за него самую тяжелую и изнурительную работу».
Первое упоминание об «искусственном человеке » великане по имени Талос — датируется III в . до н . э . Не менее древним прообразом робота является глиняный колосс Голем, обладавший чудовищной физической силой. Дошедшие до нас достоверные сведения о механических людях , созданных человеком , относятся к I в . и связаны с именем Герона Александрийского . Этот известный древнегреческий механик сконструировал устройство, с помощью которого «оживали» статуи, установленные в храме Дионисия. Стоило на жертвеннике храма запылать огню, как фигуры бога Дионисия и его жены Ариадны начинали двигаться. Особого внимания заслуживают механические люди и животные , созданные искусными мастерами средних веков. К их числу относится «Петух, машущий крыльями» (XIII в.) Девятьсот лет назад Аль-Джазири изобретал и конструировал такие автоматические устройства, как водяные часы, различные кухонные приспособления и музыкальные инструменты, движимые силой воды.
Дошедшие до нас достоверные сведения о механических людях , созданных человеком , относятся к I в . и связаны с именем Герона Александрийского . Этот известный древнегреческий механик сконструировал устройство, с помощью которого «оживали» статуи, установленные в храме Дионисия. Стоило на жертвеннике храма запылать огню, как фигуры бога Дионисия и его жены Ариадны начинали двигаться. Особого внимания заслуживают механические люди и животные , созданные искусными мастерами средних веков. К их числу относится «Петух, машущий крыльями» (XIII в.) Девятьсот лет назад Аль-Джазири изобретал и конструировал такие автоматические устройства, как водяные часы, различные кухонные приспособления и музыкальные инструменты, движимые силой воды.
«Утка, принимающая пищу» автоматон Вокансона, 1739 год
Мудрец Лао Цзы упоминал в своих сочинениях механического человека, разработанного специально на потеху императора.
В Средние века центром научной мысли, как известно, стали монастыри. Теолог Альберт Великий, по легенде, создал автоматическую служанку, которая могла самостоятельно передвигаться и даже повторять отдельные слова.
На Руси существовала своя история о «железном мужике» Ивана Грозного, причём упоминание о нём сохранилось в письмах голландского купца. Однако описанное легко поставить под сомнение и даже обозвать домыслами. Подтверждённый факт – схемы и чертежи великого итальянского художника и ученого Возрождения Леонардо да Винчи. По его работам в XX веке создали точная функционирующая копия рыцаря, который мог двигать руками и ногами и открывать рот.
Творение Леонардо да Винчи
Но прежде, в 1495 г. именно да Винчи представил схему механического рыцаря, который мог сидеть, двигать руками, головой и открывать, закрывать челюсть. Среди историков принято считать эту схему первым реалистичным проектом человекоподобной машины.
В средневековье продолжалось развитие робототехники. Часовщики, как с Европы, так и с России, создавали автоматы в виде людей, животных, ангелов, которые устраивали целые представления. Тогда появились и сложные человекоподобные и зооморфные автоматоны: львы рычали, птицы пели. Тот же Леонардо да Винчи изобрел механического льва. Лев мог пройти несколько шагов и, остановившись, открывал в своем боку дверцу.
Тот же Леонардо да Винчи изобрел механического льва. Лев мог пройти несколько шагов и, остановившись, открывал в своем боку дверцу.
Созданный сотрудниками музея «Леонардо 3» в Милане механическая статуя льва на основе чертежей и описаний, сохранившихся в рукописях Леонардо да Винчи.
Механизм состоит из деревянных и металлических деталей с использованием веревочных передач в движущихся частях. Длина льва — 3 метра, высота — 2 метра. Сейчас лев выставлен в Институте итальянской культуры в Париже.
Каково это — быть роботом?
…— Чтоб ты сдох, урод! — Невыполнимая команда (Из к/ф Терминатор - 3: Восстание машин)
В глазах Карела Чапека (и ряда других фантастов, изобретателей, мыслителей) механические люди — они же «роботы» — внешне подобные человеку, отличаются от него целым рядом качеств, превращающих этих существ в живую машину.
Роботы не чувствуют боли, не испытывают человеческих чувств. Они созданы людьми для того, чтобы выполнять порученную работу, и в этом смысле не только не уступают людям, но и превосходят их по искусности и физической силе. В обществе роботам нередко отводилась роль чернорабочих и солдат.
В обществе роботам нередко отводилась роль чернорабочих и солдат.
Предприимчивые промышленники в погоне за прибылью налаживают массовое производство роботов. Сами люди тем временем перестают трудиться, и, по выражению одного из героев пьесы, наступает «сплошная сумасшедшая скотская оргия». В конце концов роботы «от ужаса и страданий обретают душу» , прозревают и восстают. Таков сюжет пьесы.
Спустя семь лет после премьеры R. U. R. американский инженер Дж. Венсли сконструировал робот «Televox» (некоторые его называют «первым в мире»).
Благодаря внешнему сходству с человеком и способности выполнять элементарные движения по командам, подаваемым человеком-оператором, робот «Televox» стал экспонатом Всемирной выставки в Нью-Йорке.
Эйдзи Накано рассказывает, что в Японии первый робот был создан в 1928 г. под руководством доктора Нисамура Макото. Творение назвали «Естествоиспытатель». Оснащенный электродвигателями, он мог менять положение рук и головы.
В наши дни популярность роботов столь велика, что они являются непременными персонажами практически любого современного научно — фантастического произведения. Пожалуй, самое непосредственное отношение к реальным проблемам робототехники имеет роман Айзека Азимова «Я, робот», в котором американский фантаст сформулировал характерные черты поведения роботов, известные во всем мире как «три закона Азимова».
3 закона Азимова
Законы гласят:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
История роботов получила толчок к развитию после Второй мировой войны. Сегодня робототехника – один из предметов изучения уже в начальной школе. И популярность этой темы только возрастает с каждым очередным этапом развития. Роботы-собаки, роботы-обнимашки, роботы-собеседники и роботы-младенцы, роботы со знанием основ медицинской помощи — всех не перечислить. Они рисуют, работают на Марсе, танцуют, убирают в доме и зрительно воссоздают весь спектр человеческих эмоций.
И популярность этой темы только возрастает с каждым очередным этапом развития. Роботы-собаки, роботы-обнимашки, роботы-собеседники и роботы-младенцы, роботы со знанием основ медицинской помощи — всех не перечислить. Они рисуют, работают на Марсе, танцуют, убирают в доме и зрительно воссоздают весь спектр человеческих эмоций.
С каждым днём механизмы становятся всё совершеннее – что не только радует и «делает жизнь лучше», но и порождает некую тревогу — а вдруг однажды настанет тот самый «прекрасный день», когда роботы, ведомые искусственным интеллектом, решат сместить человечество с пьедестала?
От фантастики — к миру за окном
Итак, коротко рассмотрев историю развития человеческой мысли о роботах, в качестве содержательного итога опишем четыре направления роботизации, крайне актуальных для наших дней.
Кого или что стремился воссоздать человек? Какие «антропоморфные протезы» оказались воплощены в действительность, покинув мир грёз, мечтаний и инсайтов?
- Спарринг-партнёр
Первый тип роботов в нашей классификации в основе своей содержит составляющую партнёрства, эдакого игрока-конкурента.
Не спешите представлять робота-боксёра, который так и норовит ответить вам левым боковым, чтоб вы, так сказать, не расслаблялись.
Для начала вообразим, что вам вдруг захотелось сыграть в шахматы. Но вот незадача — по каким-то причинам у вас нет партнёра. Может ли человек сыграть в шахматы «сам с собой»? Уникальное зрелище, на первый взгляд. Но, что не сложно проверить самостоятельно, ещё как сможет человек сам с собой — хоть в шашки, хоть в го. Неудобно, разве что доску с фигурами «ворочать» или после каждого ходя пересаживаться на новое место.
Как тут не придумать да не изобрести робота для спарринг-парнёра? Он и становится тем самым протезом человеческой составляющей, позволяющей даже в шахматы с собой играть.
Пожалуй, наиболее известным таковым примером в новейшей истории стал легендарный матч Гарри Каспарова и шахматного суперкомпьютера Deep Blue, в 1997 г. Легендарным его называет потому, что впервые человек «проиграл искусственному интеллекту». Кстати, тот же Каспаров неоднократно одерживал победу (как в матчах до, так и после), но память людская зафиксировала именно этот момент.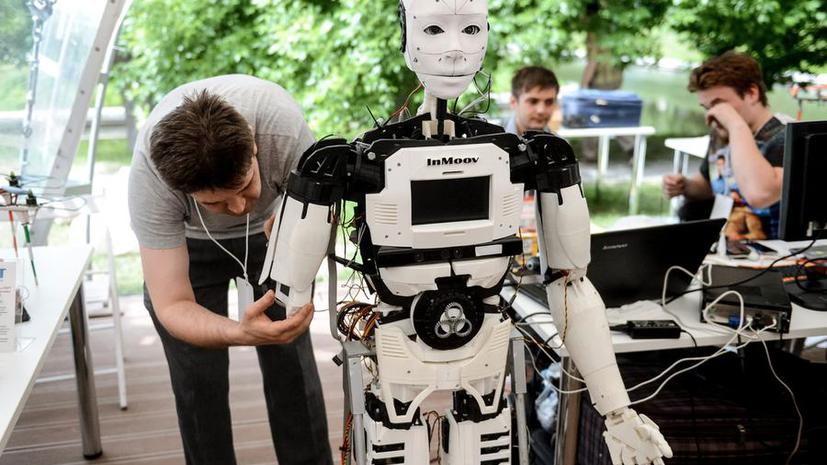
2. Помощник
Тот самый робот-ассистент, робот-заменитель, робот, разгружающий сознание человека от механических тяжёлых операций, о котором писал Карел Чапек.
В робототехнике бытует некое устоявшееся мнение, что роботом можно назвать такое устройство, у которого имеются в совокупности две основные части: исполнительный механизм — «рука» — 1 и система управления этим механизмом — «мозг» робота — 2 (см. рис.1). Такое представление о роботе проясняет вопрос о том, почему электроинструменты роботами не являются: кроме простого выключателя, в них отсутствует система, управляющей исполнительным механизмом (например, пилой, сверлом и пр.).
Рис. 1
Модель пары «мозг-рука» уже напрямую подсказывает, по какому принципу в истории состоялось «протезирование» человека, породившее столь различные вариации роботов-помощников. Причём, обратите внимание: в жизни мы не задумываемся, каким образом совершаем те или иные действия руками или ногами. Мы действуем автоматически. Соответственно, мы могли бы заключить следующее: именно автоматика как комплексный механизм человеческой конструкции и встаёт источником и «идейным вдохновителем» изобретателей.
Соответственно, мы могли бы заключить следующее: именно автоматика как комплексный механизм человеческой конструкции и встаёт источником и «идейным вдохновителем» изобретателей.
Не забудем и о «золотом правиле»: лень есть двигатель прогресса. А как же без Матушки?
3) Генератор
Пожалуй, один из самых сложных и редких видов роботов. Представьте себе, как на основании уже известных данных, некий робот «берётся за дело» и генерирует нечто новое — например, новый продукт, изобретение, да ту же машину. В частности, без такого типа роботов не было бы автомобилей Mazda 6 и Ford Focus.
Но, как говорится, «не машиной едины будем». Сегодня, наверное, продуктами мира материального никого не удивить — а как насчёт фруктов из сада мира чувственного и эмоционального?
Похоже, и с этими задачами роботы-генераторы справляются неплохо. Пишут картины, стихи, даже музыку. К примеру, компания Over the Bridge из Торонто разработала алгоритм на основе искусственного интеллекта, который «написал» новую песню в стиле группы Nirvana спустя 27 лет после смерти Курта Кобейна.
Вам по-прежнему кажется, что роботы неразумны? Но ведь без функций разума генераторы не были бы способны выполнять задачи такого широкого плана. Не так ли?
4) Арифмометр
Относительно распространённый вид роботов, без которых, наверное, вообще сложно представить современный век. Роботы такого класса обобщают уже известные данные, на основании различных моделей и принципов работают с полученными с базами данных (каталог которых непрерывно пополняется). На базе разработанных ходов и алгоритмов «роботы-арифмометры» способны выдавать и решения, и даже прогнозы. Метафорично такого робота древние греки назвали бы оракулом. Одной из ярчайших историй об оракулах стала история 2017-2018 года, главный герой короткой — электронный робот-оракул, давший в ходе Кубка конфедераций на 80% точные прогнозы.
«Мы заранее поместили листки бумаги с названиями команд-соперников, а также надписью «Ничья» в специальные кубики. Проанализировав три кубика с помощью встроенных видеокамер, Бакстер выберет нужный кубик и передаст его сотруднику «Робостанции» для объявления, как мы надеемся, верного прогноза», — пояснили в пресс-службе площадки «роботостанции» ВДНХ. Так, перед первенством Бакстер прошёл специальную подготовку. За месяц он изучил футбольные матчи, интервью футболистов и анализировал прогнозы спортивных экспертов.
Так, перед первенством Бакстер прошёл специальную подготовку. За месяц он изучил футбольные матчи, интервью футболистов и анализировал прогнозы спортивных экспертов.
Кроме угадывания результата робот успешно трудится сортировщиком на заводе, а также играет в крестики-нолики с посетителями ВДНХ. В общем, умный «парень».
Пора снять с лица розовые очки
Конечно, не о роботах, играющих в крестики-нолики, мечтают ведущие умы нашего технологического нано-века. Равно как и не оракулы и не генераторы тревожат дальновидные головы и сердца, что всматриваются в горизонты будущего человечества…
Есть и пятый тип робота, который не входит ни в одну из вышеперечисленных категорию. Не входит по одной простой причине: пятый тип включает и объединяет в себе все четыре направления — и арифмометр, и генератор, и функцию помощника, и спарринг-партнёра. Но самое главное, он имеет ту функцию, которой не располагал ни один робот со времён Голема или механического робота Леонардо да Винчи.![]() Функцию самостоятельного управления и контроля. Назовём такого робота «автопилот».
Функцию самостоятельного управления и контроля. Назовём такого робота «автопилот».
Именно это направление роботизации, пожалуй, и выступает самым опасным и слабопрогнозируемым в плане масштаба последствий. И единовременно — самым «соблазнительным», потому как роботы такого класса сулят невероятные преимущества.
Развивать такое направление или же не стоит — вопрос яростно обсуждаемый за закрытыми дверьми. И это — далеко не шутка; ведь у подарка в виде «самостоятельной возможности осуществлять контроль и управление» — своя цена. «Машины захватили мир» — такова одна из ведущих угроз будущего, описываемых фантастами уже не одно столетие.
Как можно представить пример работы такого робота: итак, допустим, просторы океана пересекает атомная подводная лодка с экипажем на борту. Допустим, что по причине нейтронного взрыва все люди на подводной лодке погибли. Однако лодка переходит в автоматический режим и продолжает нести службу без экипажа, продолжает сканировать пространство, принимать целеуказания, пока в определённый момент времени не «выпустит на волю» все 16 баллистических ракет по выбранным мишеням.
Вот как может выглядеть таковой тип роботов.
Что же, теперь кинофильм «Терминатор» не кажется таким уж фантастическим? Впрочем, возникает и иной вопрос. Чисто научного характера и толка:
А откуда возникают идеи об этих роботах?
Допустим, спарринг-партнёр? Вспомним тот факт, что человек сам с собой может сыграть со всей непринужденностью — даже в шахматы. Значит, в человеке есть определённый механизм или система, позволяющие это сделать — играть сам с собой, в том числе, поворачивая доску. И эту систему «хочется овеществить» — с собой, всё-таки играть — может и наскучить.
Откуда возникает помощник? Идея робота-помощника тоже родом из человеческой конструкции, поскольку у каждого «хомо сапиенс» такая вспомогательная система есть, и она называется автоматика или «система автоматизмов человеческого тела», что и помогает нам жить.
Рассматривая такой тип роботов как «генератор», отмечая их удивительную способность формировать новые своды данных, рже материализуя из них конечные продукты (хоть машину, хоть картину маслом) мы могли бы говорить о механизме «разум», который и выступает исходным прототипом. Соответственно, «праотцем» арифмометра является человеческий ум.
Соответственно, «праотцем» арифмометра является человеческий ум.
Базовая система управления (или «автопилот») — пожалуй, самая тайная система с точки зрения прототипа. Известными (правда, не психологии) категориями «ум, разум, психика или сознание» в данном случае не обойтись. Не станем томить читателя, хотя и сыграть в игру «а что вы думаете по этому поводу?» Тоже можно.
Поэтому, как в случае со сканвордами и кроссвордами, ответ мы предоставим, здесь — в самом конце статьи-рассуждения.
В основе «автопилота» или базовой системы самостоятельно управления и контроля лежит блок памяти ЯРГ — ядро рецензорной группы. ЯРГ ещё называют универсальным счётно-решающим прибором, генераторам силы, вечным двигателем, в общем, той самой системой, которой и уподоблен терминатор, что не остановится никогда.
Его нельзя подкупить. С ним не договориться. Ему не ведомы жалость, раскаяние или страх. И он ни за что не остановится. Никогда…
Продолжение следует.
Авторы: Лопатюк Ирина Игоревна — психоадиагност, сотрудник Института Памяти, секретать Психолого-Философского научного сообщества, член-корреспондент УАН, эксперт EUASU
Dr. Мальцев Олег Викторович, академик EUASU, Академик УАН, доктор философии, руководитель Одесского регионального отделения УАН, председатель Одесского фотографического общества, создатель и Руководитель Экспедиционного корпуса НИИ Памяти.
«Я хочу сделать робота, который сможет кормить моего кота»
Один робот добывает для полярников питьевую воду, другой выращивает растения без земли. Это реальные проекты, с которыми дети выступали на робототехническом чемпионате в Иркутске в этом году. «Мел» и «Робосиб» рассказывают, каких роботов привезли на этот чемпионат участники и почему участвовать в нём не только интересно, но и полезно.
От подъёмного крана к роботу Васильичу
Кирилл Богданов начал собирать собственные конструкции из Lego, когда ему было два года.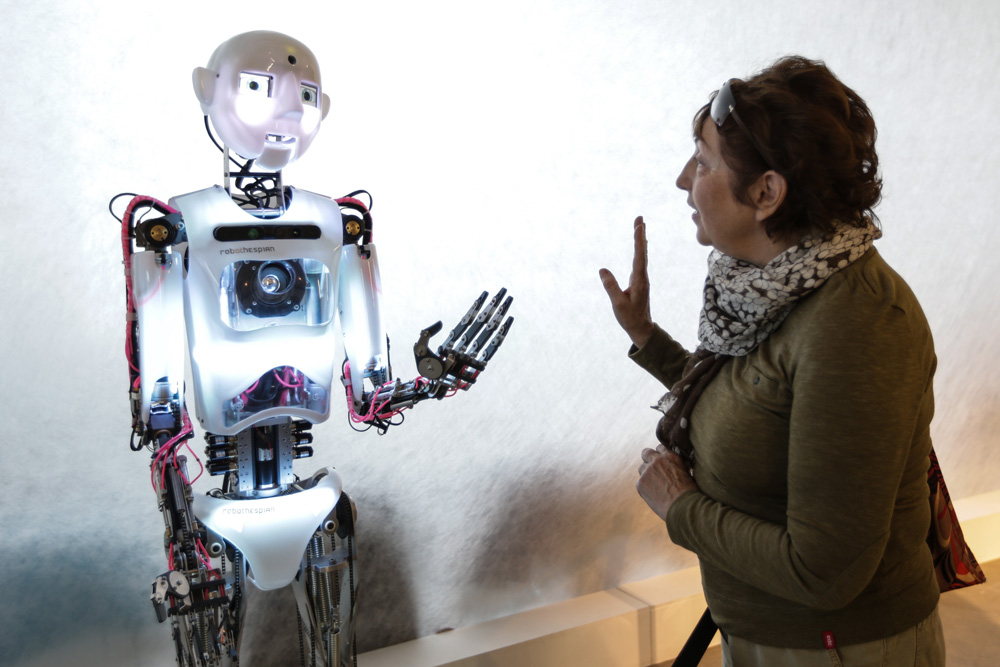 «Однажды, пока мы собирались в детский сад, он буквально на пять минут ушёл в комнату, а потом позвал меня смотреть на подъёмный кран, — говорит Ирина Богданова, мама Кирилла. — Я пошла. Оказалось, что он действительно построил кран со стрелой, очень похожий на настоящий. При этом никакой инструкцией Кирилл не пользовался, ему всегда нравилось всё придумывать самому». Ирина решила: раз сыну так нравится собирать конструкции, то почему бы ему не начать заниматься робототехникой? Даже если он не станет инженером, это хорошо развивает логическое мышление.
«Однажды, пока мы собирались в детский сад, он буквально на пять минут ушёл в комнату, а потом позвал меня смотреть на подъёмный кран, — говорит Ирина Богданова, мама Кирилла. — Я пошла. Оказалось, что он действительно построил кран со стрелой, очень похожий на настоящий. При этом никакой инструкцией Кирилл не пользовался, ему всегда нравилось всё придумывать самому». Ирина решила: раз сыну так нравится собирать конструкции, то почему бы ему не начать заниматься робототехникой? Даже если он не станет инженером, это хорошо развивает логическое мышление.
Сейчас Кириллу пять лет, и в этом году он впервые участвовал в «РобоСибе» — главном сибирском фестивале по робототехнике. В команде Кирилла было четыре человека, и вместе они придумали робота, который может добывать для полярников питьевую воду. Робота зовут Васильич, он умеет ездить по заснеженной поверхности, отличать снег ото льда, растапливать снег и наливать жидкость в тёплый контейнер. Правда, пока Васильич существует только в виде модели из Lego. Но он умеет двигаться, и у него есть датчик, который различает препятствия.
Но он умеет двигаться, и у него есть датчик, который различает препятствия.
На фестиваль «Робосиб» приехали дети от 5 лет
Отнимут ли роботы работу у человека
Когда в XIX веке американский учёный Александр Белл запатентовал первый телефонный аппарат, человечеству потребовалось 35 лет, чтобы привыкнуть к новому прибору. К началу XX века телефоном пользовались примерно четверть американцев. На то, чтобы телевизор из новейшего изобретения превратился в часть повседневной жизни, ушло 26 лет. Чтобы привыкнуть к персональным компьютерам, людям понадобилось 16 лет, зато интернет распространился по всему миру всего за семь. Есть такое понятие, как диффузия технологий — это когда новейшие технологии проникают в повседневную жизнь. С каждым годом эта самая диффузия происходит всё быстрее. Если верить прогнозам, то к 2018 году по всей Великобритании уже будут ездить беспилотные автомобили, а в ближайшие десятилетия большую часть ручного труда будут выполнять роботы.
Некоторые паникуют из-за того, что роботы могут занять наши места на рынке труда и многие профессии окажутся невостребованными. С другой стороны, как считает маркетолог Гектор Гонсалес-Хименес (он преподаёт в Йоркском университете и изучает взаимодействие между людьми и роботами), с развитием робототехники появятся и новые профессии. Вероятно, искусственный интеллект сможет заменить переводчиков, водителей, работников кадровых агентств. Но ведь кому-то нужно будет обучать и конструировать роботов. Появится больше компаний, разрабатывающих программное обеспечение. Будут дизайнеры и даже пластические хирурги для роботов. А стать ими смогут те, кто уже сейчас конструирует роботов — или хотя бы их упрощённые модели на LEGO или Arduino.
С другой стороны, как считает маркетолог Гектор Гонсалес-Хименес (он преподаёт в Йоркском университете и изучает взаимодействие между людьми и роботами), с развитием робототехники появятся и новые профессии. Вероятно, искусственный интеллект сможет заменить переводчиков, водителей, работников кадровых агентств. Но ведь кому-то нужно будет обучать и конструировать роботов. Появится больше компаний, разрабатывающих программное обеспечение. Будут дизайнеры и даже пластические хирурги для роботов. А стать ими смогут те, кто уже сейчас конструирует роботов — или хотя бы их упрощённые модели на LEGO или Arduino.
Что даёт современным детям чемпионат по робототехнике
«Вот мы с вами сейчас разговариваем по телефону, а через несколько лет, может, телефоны будут сами улавливать и передавать собеседнику всё, что нам нужно сказать», — говорит Ксения Шишова. Ей 11 лет, и она капитан красноярской команды Winners, которая в 2017 году выиграла на фестивале «РобоСиб» путёвку на международный робототехнический чемпионат FIRST.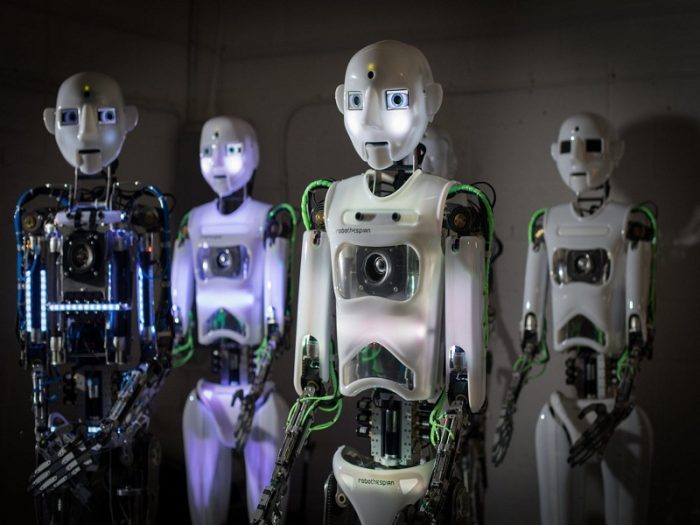
«Вообще-то я попала в нашу команду случайно. Я хорошо говорю по-английски, особенно мне нравится технический английский. Так что сначала я была переводчиком. Но потом втянулась и в остальное. Я уже тогда увлекалась робототехникой, но была на более простом, начальном этапе. А теперь догнала команду и стала капитаном».
Ксения Шишова, капитан команды победителей «РобоСиба»
Ксения живёт в Красноярске и занимается в лаборатории «Инженеры будущего» — это школа робототехники, где учат конструировать и программировать машины из Lego. Несколько лет назад, когда Ксения только начинала заниматься, девочек на занятиях почти не было. «Я была первой девочкой в лаборатории, которая начала ездить на соревнования, — говорит Ксения. — Зато теперь всё по-другому. В моей школе многие девочки записались в инженерный класс и ходят на кружки по робототехнике».
Команда Winners со своим проектом
Её команда Winners собрала на фестивале модель гидропонной установки, которая может выращивать растения без помощи земли. «Во многих странах не хватает земли, а в нашем устройстве циркулируют вода и удобрения. Теперь мы будем представлять свой проект уже в Шанхае», — рассказывает Никита Жильцов, ещё один участник команды.
«Во многих странах не хватает земли, а в нашем устройстве циркулируют вода и удобрения. Теперь мы будем представлять свой проект уже в Шанхае», — рассказывает Никита Жильцов, ещё один участник команды.
«РобоСиб» — это фестиваль-чемпионат, который в этом году проходил уже в пятый раз. Сюда приехали около 700 школьников и студентов из разных городов. Соревнования прошли по десяти разным направлениям для разных возрастов. Участники направлений FIRST LEGO League и Junior FIRST LEGO League готовили проекты, связанные с гидродинамикой — они конструировали роботов, которые помогут сохранить водные ресурсы планеты. А в направлении «РобоКарусель» выступали уже более старшие участники: их роботы могут считать цилиндры определённых цветов и даже играть в боулинг.
Фестиваль — проект фонда Олега Дерипаски «Вольное дело» и компании Еn+ Group. Как объясняют в компании, их главная цель — найти талантливых школьников, которым интересны робототехника и инженерное дело, и помочь им получить образование. Фонд «Вольное дело» ещё с 2008 года поддерживает кружки по робототехнике, мехатронике и программированию, устраивает фестивали и соревнования. Для этого они запустили специальную программу «Робототехника: инженерно-технические кадры инновационной России».
Фонд «Вольное дело» ещё с 2008 года поддерживает кружки по робототехнике, мехатронике и программированию, устраивает фестивали и соревнования. Для этого они запустили специальную программу «Робототехника: инженерно-технические кадры инновационной России».
«Это огромный блок образовательных программ, и здесь, в Сибири, мы его поддерживаем. В 90-е годы в России стало недоставать инженеров, все шли учиться на юристов и экономистов. Но теперь технические специальности очень востребованы. Мы стараемся сделать так, чтобы дети, у которых есть инженерный талант и которым нравится конструировать, с самого детства могли начинать учиться».
Елена Вишнякова, директор по связям с общественностью En+ Group
На «РобоСибе» и других соревнованиях победители могут получить дополнительные баллы для поступления в ВУЗы. En+ Group заинтересована в том, чтобы в России было больше квалифицированных инженеров с хорошим образованием. Но главное — не вырастить кадры «под себя», а дать каждому талантливому ребёнку возможность самореализоваться.
Впрочем, чтобы заниматься робототехникой, не обязательно быть будущим инженером. Как объясняет Вишнякова, на занятиях учат ещё и работать в команде, и представлять свои проекты перед жюри. Так что это может пригодиться любому современному школьнику. Например, Варваре Есиной 11 лет, и она уже второй год занимает призовые места в состязании «Шорт-трек», где нужно собрать самого быстрого робота.
Варвара Есина на церемонии награждения
«Четыре года назад я стала ходить в кружок робототехники за компанию со старшим братом, и мне понравилось, — говорит Варвара. — Мне дали собрать самого простого робота, но он показался мне очень сложным. Зато сейчас я бы собрала такого за одно занятие. Самое интересное — это проводки, которые надо правильно подключить».
Когда-нибудь Варвара планирует сконструировать робота, который сможет кормить её кота: в определённое время высыпать в миску корм из контейнера и контролировать количество этого корма. Но при этом, кроме робототехники, Варвара занимается музыкой и шахматами.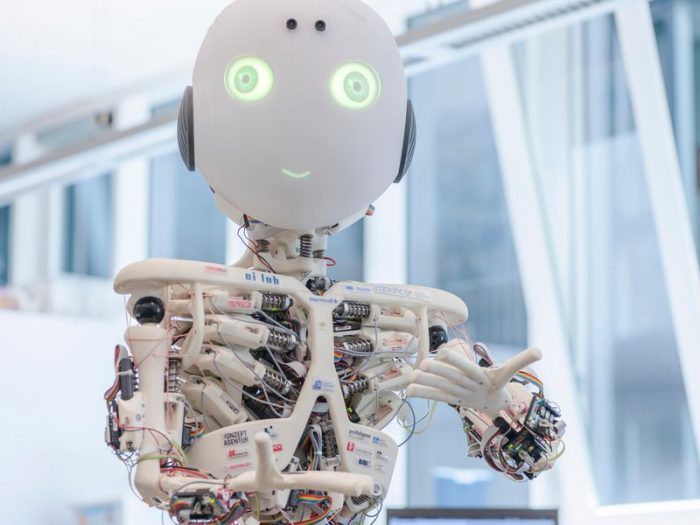 Она говорит, что не хочет становиться ни программистом, ни инженером. Но даже если её профессия не будет связана с роботами и технологиями, это не значит, что она не может ими увлекаться.
Она говорит, что не хочет становиться ни программистом, ни инженером. Но даже если её профессия не будет связана с роботами и технологиями, это не значит, что она не может ими увлекаться.
теперь я хочу робота, а не собаку. Читайте на Cossa.ru
В этом разделе материалы размещаются пользователями сайта и публикуются после одобрения модератором. Редакция не несет ответственности за орфографические и другие ошибки, хотя и старается исправлять их по мере возможности.
Добавить свою заметку вы можете на этой странице.
29 июля 2014, 20:27
2014-й можно по праву назвать неофициальным годом робототехники в России. Москва ранее еще не переживала такого аншлага роботов.
Лея Органа
Поделиться
Поделиться
А ведь действительно, роботы везде: на общественно значимых мероприятиях, в залах торговых центров, городских парках, ну и, чего скрывать, в ваших домах, прогрессивные занятые жители мегаполиса. В столичных апартаментах уже совсем не удивительно встретить робота-пылесоса или, к примеру, робота-полотера.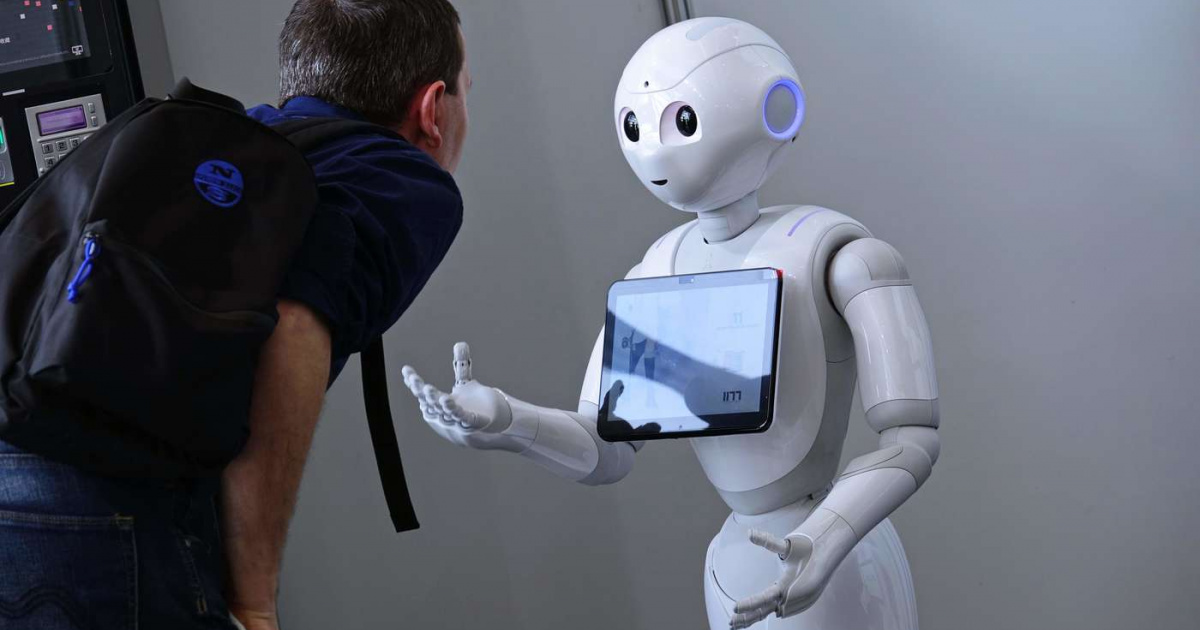 Сегодня даже неискушенному различными технологичными штуками обывателю заметно то ли резкое, то ли плавное внедрение робототехники в нашу с вами повседневную жизнь.
Сегодня даже неискушенному различными технологичными штуками обывателю заметно то ли резкое, то ли плавное внедрение робототехники в нашу с вами повседневную жизнь.
Что же это происходит, господа? Поглядываем мы на них пока еще, как на «килограммовую нокию» в середине 90-х в руках «малинового пиджака», быстро прошмыгнувшего из мерседеса в мерседес. Напомню, что более поздняя, но одна из самых популярных моделей телефона, Nokia 3310, была выпущена в четвёртом квартале 2000 года. Тут самое место для неутомимых возгласов о быстротечности времени, ведь с тех пор прошло почти 15 (!) лет. Если проанализировать, как менялись технологии за весь этот период, возникают вполне логичные вопросы. А именно, сколько будет длиться наша ментальная адаптация к новому витку развития технологий — робототехнике, и как скоро роботы станут такой же неотъемлемой частью нас, как сегодня iPhone?
Начните размещать официальную рекламу в Telegram Ads через click.ru
Зарегистрируйтесь и продавайте товары или услуги в Telegram Ads с помощью готового решения от click.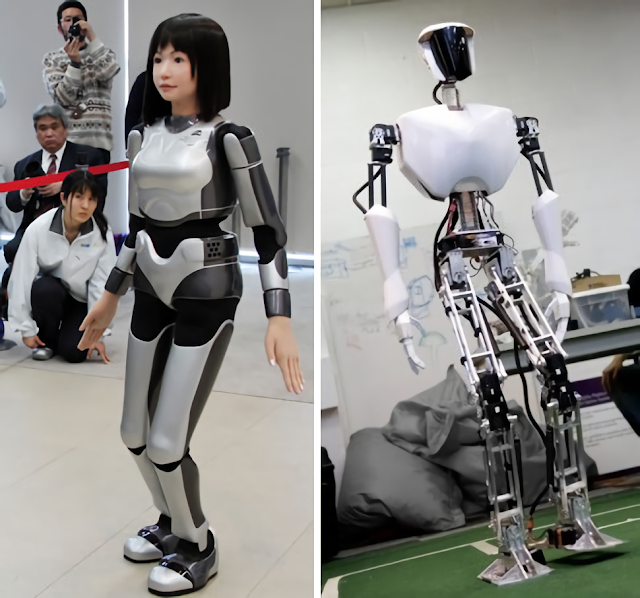 ru. Опередите конкурентов!
ru. Опередите конкурентов!
Бюджет от 3 000 €. Это гораздо дешевле, чем работать напрямую.
Для юрлиц и физлиц. Юрлица могут получить закрывающие документы, возместить НДС. Физлица — запустить рекламу без общения с менеджерами.
3 способа оплаты. Оплачивайте рекламу картой физического лица, с расчётного счета организации, электронными деньгами.
Подробнее →
Реклама
Говоря о робототехнике в широком смысле, каждый из нас представляет никак не промышленных гигантов, создающих автомобили на заводах, скорее наша фантазия упорно рисует образы машин из самых кассовых экшенов. Другими словами, нас больше интересуют сервисные или человекоподобные роботы.
Вот какой прогноз предлагает нам Японская ассоциация робототехники:
Первым коммерческим версиям домашних роботов нужно не так уж и много — отработанная механика движений, умение распознавать предметы, ориентироваться в пространстве и понимать десяток-другой простых команд хозяина (налить кофе, прибраться в комнате и прочее). На данный момент большинство из этих задач решены или находятся на стадии решения. То есть совсем скоро все свершится! Технология движений — посмотрите на роботов по типу ASIMO (на днях в Бельгии была представлена усовершенствованная модель, как сообщает The Telegraph), умение распознавать лица — уже используется в современных фото и видео камерах, умение распознать голос и команды — функция не сложнее предыдущих.
На данный момент большинство из этих задач решены или находятся на стадии решения. То есть совсем скоро все свершится! Технология движений — посмотрите на роботов по типу ASIMO (на днях в Бельгии была представлена усовершенствованная модель, как сообщает The Telegraph), умение распознавать лица — уже используется в современных фото и видео камерах, умение распознать голос и команды — функция не сложнее предыдущих.
Учитывая тенденцию удешевления компонентов, стремительный рост количества производителей и прочие факторы, можно с уверенностью заявить: роботу в каждом доме быть! И не удивляйтесь, когда ваш ребенок вместо собаки попросит купить робота:
А вот и ссылка на само видео:
http://www.youtube.com/watch?v=3N1Q8oFpX1Y
Стоит отметить, что одними из первых, кто начал активно привлекать внимание к робототехнике на просторах СНГ стали находчивые маркетологи. Ни для кого не секрет, что в своем стремлении привлечь внимание потребителя «боги» рекламной индустрии часто задействуют новые технологии. Начиная от использования в рекламных роликах оригинальных девайсов и заканчивая масштабными промо-акциями, с участием лучших изобретений современности.
Начиная от использования в рекламных роликах оригинальных девайсов и заканчивая масштабными промо-акциями, с участием лучших изобретений современности.
Так, например, даже в качестве промоутеров компании все чаще начинают использовать роботов.
Робот от российского разработчика—группы компаний Rbot
Учитывая неоспоримый факт молниеносного развития робототехники, в Москве, как и во всем мире, появляются специализированные мероприятия, собирающие все эти чудеса современной науки под одной крышей. Хотя, уважения ради, стоит вспомнить, что самая популярная выставка роботов IREX, японская (что совсем не удивительно), впервые была проведена в 1973 году.
Возвращаясь на Родину, из более свежих воспоминаний совсем недавно отшумевший Бал Роботов в Москве, который показал достаточно крутых представителей робото-фауны: робот Tespian,Titan, Baxter и другие.
Пройдет совсем немного времени и уже в ноябре в Москву снова вернутся роботы, но уже на вторую выставку робототехники Robotics Expo 2014.
Чем будут удивлять в этот раз пока неизвестно, но радует сам факт востребованности мероприятий робототехнического характера, а точнее желание людей знакомиться с новыми технологиями. Ведь мы не на пороге будущего, будущее уже сегодня.
Поделиться
Поделиться
Письма Коссы — лаконичная рассылка диджитала. Один раз в неделю, без инфошума: cossa.pulse.is
А еще обязательно подписывайтесь на наш Telegram-канал, там вся самая свежая информация!
Сбой системы. Как заставить банковского бота соединить вас с оператором
Деньги
Вслух.ру
3 февраля 2021, 11:10
Советы в ситуации «как действовать, если вам звонят мошенники» всегда включают в себя предложение перезвонить в банк самому. Это логично, разумно и правильно, но не всегда удается. Автоинформатор на горячей линии, как секретарша перед кабинетом директора, — «на амбразуру ляжет», но дальше себя не пропустит. Получается замкнутый круг: вам надо срочно связаться с сотрудником банка, но банк такой возможности не дает. Редакция «Выберу.ру» провела собственный эксперимент: попробовала выйти на живого сотрудника банка в обход ботов и автоответчиков.
Редакция «Выберу.ру» провела собственный эксперимент: попробовала выйти на живого сотрудника банка в обход ботов и автоответчиков.
Мошенники не дремлют
Читательница недавно столкнулась с очень хитрой схемой. Поддельный представитель банка сообщает жертве, что с её счёта пытаются несанкционированно вывести деньги. Поскольку сбережения на вкладе теперь в опасности, их надо немедленно перевести на другой счёт. Более того, мошенник убеждает собеседника приехать в офис банка, чтобы разобраться на месте. Это вызывает больше доверия со стороны жертвы — раз просят приехать в офис, значит, всё по-настоящему. Человек хватает документы и выдвигается в банк. А мошенник тем временем не оставляет жертву ни на минуту и подогревает нервозность, не давая подумать.
Что рекомендуется делать в такой ситуации первым делом? Звонить в банк. Звоним, а там равнодушный бот, который упорно не желает соединить с живым человеком. Пытаемся связаться со специалистом банка в чате приложения. Но вместо того чтобы решить проблему, он включает скрипт и начинает продавать кредитную карту. Зато мошенники вежливые, учтивые и настойчиво «хотят помочь».
Но вместо того чтобы решить проблему, он включает скрипт и начинает продавать кредитную карту. Зато мошенники вежливые, учтивые и настойчиво «хотят помочь».
После этого случая стало понятно, что голосовой робот работает по определённым алгоритмам. На каждую фразу клиента запрограммировано определённое действие автоответчика. В таком случае можно предположить, что есть фразы, открывающие дверь, за которой прячутся живые люди.
Мы придумали и протестировали несколько способов, как связаться со специалистом банка в обход робота. Но хочется отметить, это не отменяет проблемы: часто клиент банка звонит на горячую линию в нервном состоянии, испуганный и расстроенный. У него нет времени, желания и возможности думать, как обойти автоматизированную банковскую систему.
Итак, рассказываем.
Дозвониться до специалиста Сбербанка
Набираем номер банка: 8−800−555−55−50.
Произносим: «Мне звонят мошенники». После этой фразы автоинформатор начинает прощупывать почву и определять размеры катастрофы. Робот Сбербанка спрашивает, сообщали вы пароль от карты злоумышленникам или нет, переводили деньги или нет. Если на все вопросы отвечать отрицательно, то банк вас похвалит и вышлет ссылку, чтобы оформить заявление о попытке мошенничества.
Робот Сбербанка спрашивает, сообщали вы пароль от карты злоумышленникам или нет, переводили деньги или нет. Если на все вопросы отвечать отрицательно, то банк вас похвалит и вышлет ссылку, чтобы оформить заявление о попытке мошенничества.
Задавая вопросы, банк просит отвечать только «да» и «нет». Если сказать «не знаю», то автоинформатор переведёт на специалиста.
Еще одна фраза для автоинформатора Сбербанка: «Хочу оформить кредит». Теоретически после этой фразы должен подключиться сотрудник, чтобы клиент «не сорвался». Однако Сбербанк рассказал условия кредита, выслал ссылку на оформление заявки и отключился.
«Хочу оформить вклад». Почему-то эта фраза поставила автоинформатор Сбербанка в тупик. Он два раза переспрашивал, а потом резюмировал: «Кажется, ваш вопрос сложный для меня. Надо ли перевести вызов на специалиста?»
«Хочу поговорить с оператором». Если не юлить, а сразу объявить о своих намерениях, то автоинформатор начнёт упорствовать и предлагать свою помощь. Если настаивать на своём, то вежливый робот будет аргументировать своё: «я ничем не хуже человека и тоже могу помочь». Выйти из замкнутого круга можно только задав вопрос, который автоинформатор не сможет понять. Мы попробовали сказать «почему не работает карта», и это сработало.
Если настаивать на своём, то вежливый робот будет аргументировать своё: «я ничем не хуже человека и тоже могу помочь». Выйти из замкнутого круга можно только задав вопрос, который автоинформатор не сможет понять. Мы попробовали сказать «почему не работает карта», и это сработало.
Дозвониться до специалиста ВТБ
В адрес горячей линии ВТБ было написано много негативных отзывов с одной жалобой — добиться связи с сотрудником кол-центра невозможно. Похоже, что банк изменил алгоритмы, потому что во время эксперимента проблем не возникло.
Набираем телефон банка: 8−800−100−24−24
«Мне звонят мошенники». После этой фразы робот на несколько секунд завис, потом предложил сделать выписку через электронные сервисы и без лишних вопросов соединил с оператором.
«Хочу оформить кредит». Автоинформатор не стал торопиться и сразу переводить на оператора. Сперва рассказал обо всех ограничениях для оформления кредита: доход, возраст, форма занятости и т. д. Соединение с сотрудником произошло только после того, как мы убедили робота в том, что препятствий к оформлению кредита нет.
д. Соединение с сотрудником произошло только после того, как мы убедили робота в том, что препятствий к оформлению кредита нет.
«Хочу оформить вклад». Прежде чем перевести звонок оператору, автоинформатор рассказал краткую информацию о налоге с доходности по вкладам.
«Хочу поговорить с оператором». В случае с ВТБ откровенность тоже не помогла. Робот упорно хотел помочь и перевёл вызов только после того, как не понял, что от него хотят. Непонятной фразой стала «не работает карта».
Дозвониться до специалиста Альфа-Банка
В адрес Альфа-Банка тоже поступают жалобы, связанные с невозможностью дозвониться до оператора.
Набираем телефон банка: 8−800−200−00−00
Первым делом автоинформатор извинился и попросил перезвонить позже, ссылаясь на большую загруженность. Но у него не получилось от нас отделаться. Безымянный робот рассказал, что участились случаи мошенничества и предостерёг от разглашения личных данных.
Произносим фразу: «Мне звонят мошенники». Видимо, клиенты Альфы часто сталкиваются с обманом, потому что без долгих разговоров автоинформатор соединил с оператором.
Видимо, клиенты Альфы часто сталкиваются с обманом, потому что без долгих разговоров автоинформатор соединил с оператором.
«Хочу оформить кредит». После этой фразы робот не стал задавать лишние вопросы и перевёл звонок.
«Хочу оформить вклад». Результат тот же, что и с кредитом — банк соединяет со специалистом.
«Хочу поговорить с оператором». Откровенность в очередной раз не помогла. Робот предложил свою помощь. Пришлось уточнить вопрос обращения и только после этого автоинформатор перевёл на оператора.
Дозвониться до специалиста банка «Тинькофф»
Набираем телефон банка: 8 800 555-25-50
Это единственный из участвовавших в эксперименте банк, автоинформатор которого представился по имени. Олег был немного сонный, но без проблем соединял с оператором на каждую из наших фраз.
Он проявил настойчивость только на запрос «хочу поговорить с оператором». Но на вопрос «почему не работает карта» не смог ответить и связал с сотрудником.
Итак, задача «поговорить с живым человеком» выполнима, но требует фантазии. Банк пытается экономить ресурсы и следует логике — «то, что можно решить самостоятельно, должно решаться самостоятельно», — и внедряет роботов, чтобы освободить операторов. В итоге раздражает и расстраивает клиентов. Особенно в нештатных ситуациях.
Фото: freepik.com
Неудобно на сайте? Читайте самое интересное в Telegram и самое полезное в Яндекс-Дзен.
Последние новости
Вслух.ру
26 сентября, 12:21
Третий этап чемпионата области по картингу выиграла команда из Ялуторовска
На втором месте сборная Омска, на третьем — «Про-Карт» из Тюмени.
#чемпионат
#авто
#соревнования
#новости Тюмени
Вслух.ру
26 сентября, 12:20
В Тюмени развозчика молока задержали за рулем пьяным
Всего за минувшие выходные от управления транспортом отстранили 58 водителей.
#ГИБДД
#пьяное вождение
#трасса
#водители
#новости Тюмени
Вслух. ру
ру
26 сентября, 12:19
«Факультетус» поможет тюменской молодежи найти работу
Платформа интегрирована с платформой «Работа России».
#новости Тюмени
#работа
#молодежь
#кадровый центр
#вакансии
Вслух.ру
26 сентября, 12:03
Директор центра «Милосердие» Андрей Якунин: Необходимо защитить наши ценности
По его мнению, сейчас решается вопрос, в какой стране мы будем жить.
#новости Тюмени
#СВО
#мобилизация
#Донбасс
#спецоперация
#служба
#армия
Вслух.ру
26 сентября, 11:55
«Безопасный город»: в Тюмени в 2023 году установят 114 камер видеонаблюдения
Сейчас в регионе функционирует более 4,4 тысячи камер.
#безопасность
#камеры
#видеонаблюдение
#Тюменская область
#Тюмень
#Ишим
#Тобольск
#Заводоуковск
#Ялуторовск
#новости Тюмени
Как выбрать робот-пылесос: помогаем определиться с критериями
Роботы-пылесосы — довольно «молодые» бытовые приборы, ситуация с которыми еще не полностью стабилизировалась: на рынке уже не один год представлено множество разнообразных моделей, но неопытному (да чего там скрывать: и опытному тоже) пользователю бывает довольно сложно оценить, чем одна модель отличается от другой и сопоставить возможности различных роботов-пылесосов.
Дополнительно запутывает ситуацию тот факт, что нередко заявленные функции не работают или работают не так, как должны (или не так, как представлял себе это пользователь). Существенно «плавают» и такие параметры, как «сила всасывания» и «время работы».
Вот и мы, приступая к тестированию очередного робота-пылесоса, нередко ошибаемся в своих первоначальных прогнозах. Иногда при распаковке прибор выглядит более чем достойно, однако показывает низкую эффективность из-за дефектов программного обеспечения. А в другой раз откровенно бюджетный и дешевый пылесос может с достоинством отработать «на пять баллов» и более чем оправдать вложенные в него средства.
Как же не ошибиться с выбором робота-пылесоса для дома? Скажем честно: однозначного ответа на этот вопрос у нас нет. Лучше всего, конечно, перед покупкой изучать профильные ресурсы (например, наш) и тематические форумы. Однако перед тем, как приступить к этому увлекательному занятию, мы можем отсеять откровенно неподходящие модели, изучив их технические характеристики.
Давайте попробуем вместе разобраться, на что нужно обратить внимание, выбирая робот-пылесос для квартиры или загородного дома.
Габариты робота
Одним из ключевых параметров робота-пылесоса являются его габаритные размеры. Понятно, что они напрямую связаны с габаритами мебели (а точнее — с высотой ниш под ней). Для современных роботов-пылесосов стандартная высота составляет 8,5-10 сантиметров, однако в случае необходимости можно подобрать и более «приземистые» модели высотой 8 сантиметров или даже чуть меньше.
Общее правило тут такое: перед выбором робота-пылесоса не помешает осмотреть квартиру и измерить высоту самых низких укромных мест, куда должен «заходить» наш робот. В случае если таких нет — можно смело не обращать внимание на данный параметр.
Гораздо более интересны такие параметры, как диаметр пылесоса (если он круглый) или длина его грани (если он квадратный). С одной стороны, более компактное устройство имеет меньше шансов «запутаться» среди домашних предметов и сможет ближе подобраться к углам. С другой — крупный корпус позволит уместить внутри более мощный мотор, более крупный контейнер для пыли и т. д. Наиболее распространенными являются роботы диаметром от 30 до 35 см.
С другой — крупный корпус позволит уместить внутри более мощный мотор, более крупный контейнер для пыли и т. д. Наиболее распространенными являются роботы диаметром от 30 до 35 см.
Что же касается квадратных роботов-пылесосов, то их основное преимущество заключается в том, что они могут точно «войти» в угол и более тщательно собрать там пыль. На открытом пространстве эффективность их уборки окажется такой же, как и у круглых моделей. Таким образом преимущество квадратных моделей оказывается довольно сомнительным: конечно, приятно увидеть чистоту в углах, однако эти зоны составляют лишь малый процент от общей площади помещения, а следовательно — на первое место при выборе той или иной модели выходят такие показатели, как общее качество уборки.
Мощность всасывания
Мощность, с которой робот-пылесос всасывает пыль, можно определить либо косвенно — по мощности, потребляемой самим устройством (измеряется в ваттах), либо по указанной в документации мощности всасывания (как правило, указывается в Па).
Рядовые модели имеют мощность всасывания не более 20-22 Вт, более дорогие и продвинутые — до 30- 35 Вт. Для повседневной уборки вполне достаточно мощности всасывания 1000 Па. Мощность флагманских моделей может достигать 4000 Па.
Наш опыт показывает, что с уборкой на обычном паркете или ламинате достойно справятся даже маломощные устройства. А вот если предполагается пылесосить ковровые покрытия, либо если в доме много пушистых домашних животных, то имеет смысл обратить внимание на более мощные модели.
Дело в том, что прилегание пылесоса к ковролину или ковру оказывается не столь плотным, чем к обычной ровной поверхности, а следовательно — для полноценной уборки ему придется приложить больше усилий.
Емкость аккумулятора и длительность работы
Емкость аккумуляторных батарей и длительность работы пылесоса без подзарядки — напрямую связанные между собой вещи. При этом от длительности работы напрямую зависит размер помещения, которое пылесос будет способен убрать за один проход. Отметим, что время работы прибора, опять-таки зависит от типа покрытия: по ровному деревянному полу пылесосу будет перемещаться проще, по ковру — сложнее. Соответственно этому несколько изменится и длительность работы.
Отметим, что время работы прибора, опять-таки зависит от типа покрытия: по ровному деревянному полу пылесосу будет перемещаться проще, по ковру — сложнее. Соответственно этому несколько изменится и длительность работы.
На современном рынке можно встретить устройства, способные проработать как совсем немного (буквально 30-40 минут), так и «продвинутые» модели, которые могут пылесосить по два часа или даже больше этого.
Примерно так выглядит стандартный аккумуляторный блок
Что такое 40 минут и какую площадь можно убрать за это время? На практике выясняется, что робот-пылесос с такой продолжительностью работы справится, разве что, с небольшой квартирой-студией, а вот даже для полноценной однокомнатной квартиры этого будет уже маловато. Также заметим, что чем больше комнат в квартире, тем больше у нашего пылесоса будет шанс «заблудиться», а следовательно — время на уборку ему может потребоваться больше.
Мы бы рекомендовали ориентироваться на формулу «одна комната = 30-40 минут работы» и добавить дополнительно 10 минут, если комнат больше одной.
Как правило, в роботах-пылесосах применяются сборки из аккумуляторов типа 18650, и такой вариант следует признать самым удачным: в случае чего аккумулятор будет несложно заменить, даже если официальных расходных материалов в продаже нет.
Типы аккумуляторов тоже бывают разными: Li-Ion, Li-Pol, Ni-MH. Наиболее распространенными (и наиболее удобными) на сегодняшний день являются литий-ионные аккумуляторы. Их можно без проблем подзаряжать в любой момент, не опасаясь возникновения побочных эффектов. А вот с эксплуатацией приборов, в которых используются менее распространенные аккумулятор, могут возникнуть определенные сложности: некоторые аккумуляторы не рекомендуется подзаряжать пока они полностью не разрядились, другие требуют периодической подзарядки если пылесос не используется в течении длительного времени, третьи заряжаются слишком долго… Не будем вдаваться в детальное описание особенностей различных аккумуляторов. Скажем лишь, что перед покупкой робота-пылесоса не будет лишним изучить инструкцию и обратить особое внимание на раздел, касающийся правил подзарядки устройства.
Сухая и влажная уборка, объем контейнеров для пыли и воды
Сухая уборка
Большинство роботов-пылесосов позволяют осуществлять лишь сухую уборку — они подметают мусор и пыль с помощью вращающихся щеток, после чего засасывают его в съемный контейнер. Контейнер требует регулярного опустошения (после каждого запуска прибора).
В большинстве случаев объем контейнера окажется достаточным. Небольшие роботы с компактным контейнером (0,2-0,25 литра), как правило, имеют невысокое время работы (40-60 минут), и попросту не успеют собрать столько мусора, чтобы контейнер переполнился.
Щеточки для сухой уборки
Ну а более выносливые устройства, способные проработать пару часов, комплектуются контейнером объемом 0,5 литра, чего, как правило, хватает. Однако если робот запускается в сильно загрязненном помещении, то не помешает остановить его в середине уборки и очистить контейнер от собранного мусора: так мы снизим нагрузку на робота и немного повысим эффективность его работы.
Некоторые устройства имеют специальный индикатор заполнения пылесборника: пылесос с такой функцией предупредит хозяина о заполнении контейнера для пыли и о том, что его пора опустошить.
Влажная уборка
Что касается устройств с функцией влажной уборки, то они укомплектованы дополнительным контейнером для воды (иногда он совмещен с миниатюрным контейнером для пыли). Вода из такого контейнера попадает на тряпку (чаще всего самотёком), в результате чего робот может не только пылесосить пол, но также и протирать его. Такая обработка, конечно, не заменяет полноценного мытья пола, однако позволит избавиться от мелких частиц пыли и вообще повысит общий уровень чистоты в доме. Поскольку контейнер для воды устанавливается в тот же отсек, что и контейнер для пыли, его размер оказывается примерно таким же.
Отметим, что по схожему принципу работают и роботы-полотеры — по своей конструкции они напоминают робот-пылесос без функции всасывания пыли. Полотер с прикрепленной тряпкой ездит по полу в автоматическом режиме и протирает его. Тряпка увлажняется по мере надобности. Все просто.
Тряпка увлажняется по мере надобности. Все просто.
Изредка встречаются и модели, в которых робот распыляет воду на пол, а затем протирает ее салфеткой. Но даже такой режим нельзя назвать полноценным мытьем. К тому же не будем забывать, что салфетку (тряпку) придется регулярно стирать.
Комбинированный контейнер для сухой и влажной уборки
Также, говоря о контейнерах для сбора пыли, упомянем и фильтры тонкой очистки. Всасывая воздух, пылесос пропускает его через фильтры, задерживающие пыль и мусор. От системы очистки напрямую зависит качество уборки и отсутствие повторного загрязнения. У роботов-пылесосов можно встретить либо фильтр грубой очистки — экономный вариант, удерживающий крупный мусор, но не защищающий от выброса пыли, либо HEPA-фильтр — многослойный плотный фильтр, задерживающий мельчайшие частицы пыли.
HEPA-фильтры
На сегодняшний день даже откровенно бюджетные модели почти всегда оснащаются HEPA-фильтром, поэтому, на наш взгляд, он является обязательным при выборе робота-пылесоса. Не стоит, правда, забывать, что срок службы такого фильтра не бесконечен, и рано или поздно его придется заменить (даже если он допускает мытье под водой).
Не стоит, правда, забывать, что срок службы такого фильтра не бесконечен, и рано или поздно его придется заменить (даже если он допускает мытье под водой).
Турбощетка
Всасывающее пыль отверстие у многих моделей роботов-пылесосов оснащено вращающейся щёткой, которая предназначена для чистки ковров и других ворсистых поверхностей.
Нужно помнить о том, что такую щетку придется чистить после каждого использования, поскольку в ней накапливается большое количество шерсти животных и волос. Как правило, пылесос без турбощетки справится с уборкой пыли на гладких поверхностях не хуже, а вот длинные волосы и мусор на ковре может и пропустить.
Управление
Подавляющее большинство роботов-пылесосов можно запустить или остановить нажатием на кнопку на корпусе устройства. Однако хорошим тоном является наличие пульта дистанционного управления или программы, позволяющей управлять роботом со смартфона через домашнюю сеть Wi-Fi. Самыми универсальными, безусловно, являются пылесосы, позволяющие задействовать оба варианта: и пульт ДУ, и смартфон.
Дистанционное управление, пульт ДУ
Пульт дистанционного управления робота-пылесоса, как правило, представляет собой обычный ИК-пульт, с помощью которого можно остановить или запустить выполнение той или иной программы (выбрать режим работы устройства), отправить его на базу для подзарядки или перевести в режим ручного управления (не слишком популярная функция, однако иногда может быть нужно направить робота вручную — например, в дальнюю комнату).
Стандартные пульт ДУ и зарядное устройство для робота-пылесоса
В некоторых случаях пульт ДУ позволяет также настроить уборку по расписанию или по таймеру.
Управление со смартфона и подключение к Wi-Fi
Более «продвинутые» модели позволяют управлять роботом дистанционно — с помощью мобильного приложения в непосредственной близости (посредством Bluetooth) или вообще из любого места (при наличии подключения по Wi-Fi).
Мобильное приложение нередко не только дублирует, но и расширяет возможности пульта ДУ. С его помощью можно не только быстро и просто настроить расписание работы устройства, но также проверить его статус (например, остаток заряда), отдать команду начать или закончить уборку, посмотреть на карту помещения и т. д.
С его помощью можно не только быстро и просто настроить расписание работы устройства, но также проверить его статус (например, остаток заряда), отдать команду начать или закончить уборку, посмотреть на карту помещения и т. д.
Конечно, все эти возможности являются далеко не обязательными, однако если вы планируете по максимуму автоматизировать уборку в доме или, например, хотите чтобы робот пылесосил квартиру в ваше отсутствие, то лучше обратить внимание на модели с подобными функциями.
Режимы уборки, встроенные программы и работа по расписанию
Количество доступных программ у роботов-пылесосов, как правило, невелико. Типичный робот может работать в «обычном режиме», перемещаться по спирали или вдоль стен, а также работать в режиме Spot — то есть, усиленно убирать грязь в одной небольшой области.
При этом «обычный режим» подразумевает, что робот попытается обойти все помещение. В более дешевых моделях его иногда заменяет режим случайного перемещения — в таком случае робот будет при столкновении с препятствием менять направление на фиксированный (либо случайный) угол и продолжать движение.
Kitfort KT-545 Krusenstern можно запрограммировать на несколько последовательных включений с помощью мобильного приложения или управлять им с пульта.
Отметим, что наличие дополнительных программ или режимов, а также способность робота строить карту помещения далеко не всегда говорят о том, что данная модель окажется более эффективна. Дело в том, что в большинстве устройств функция построения карты работает либо очень странно, либо откровенно плохо. Поэтому относиться к ней нужно осторожно — не нужно ожидать, что если на коробке написано, что робот строит карту помещения, то он и в самом деле построит полноценную карту (наподобие человека с листочком бумаги) и тщательно обойдет всю квартиру, не пропустив ни одного угла.
Так выглядит попытка робота построить карту
Скорее такую информацию нужно понимать как «робот ориентируется в помещении чуть лучше, чем модели без данной функции», не более того.
А вот работа по расписанию может от модели к модели быть реализована как очень удобно, так и из рук вон плохо. Хороший и умный робот-пылесос позволит вам легко и просто настроить сразу несколько расписаний — и будет автоматически запускаться в разное время в зависимости от дня недели или по другому установленному вами графику (хоть по несколько раз в день).
Хороший и умный робот-пылесос позволит вам легко и просто настроить сразу несколько расписаний — и будет автоматически запускаться в разное время в зависимости от дня недели или по другому установленному вами графику (хоть по несколько раз в день).
Если же разработчикам было лень продумывать такие нюансы, то максимум, на что вы можете рассчитывать — однократный запуск ежедневно в указанное время.
Датчики и реакция на препятствия
В зависимости от конфигурации помещения, которое предстоит убирать, робот должен адекватно реагировать на препятствия. Понятно, что робот-пылесос должен уметь пересекать пороги и другие незначительные возвышения: без этой функции он будет застревать даже в обычной квартире. Поэтому не будет лишним измерить высоту порогов в доме и свериться с инструкцией — не превышает ли она рекомендованных значений.
Бюджетные модели, как правило, оснащены эластичным резиновым бампером по периметру и датчиком столкновений. Они будут путешествовать по квартире и изменять свое направление лишь после физического столкновения с препятствием.
Более продвинутые устройства оснащены различными сенсорами и датчиками, в числе которых стоит отметить лазерные и оптические датчики (с их помощью робот измеряет расстояние до препятствия и вовремя меняет направление движения), ультразвуковые датчики позволят устройству без труда заезжать под мебель и выбираться из-под нее, обнаруживать дверные проемы и переходить к уборке соседней комнаты. Наконец, с помощью инфракрасных датчиков робот не упадет с лестницы и вовремя остановится при резком перепаде высоты.
Типичная «башенка» лазерного дальномера — 360 S7
Большинство устройств ориентируется в пространстве при помощи инфракрасного луча, с помощью которого он может самостоятельно ездить по комнате, не натыкаясь на стены и препятствия, а также автоматически возвращаться к базе для подзарядки.
Отметим, что в качестве дополнительных ограничений нередко используются «виртуальные стены» — специальные инфракрасные излучатели, блокирующие проход робота в помещения, куда ему нельзя, либо обычные магнитные ленты, которые пылесос не может переступить.
Некоторые модели могут быть дополнительно оснащены датчиком загрязнения, с помощью которого определяется степень загрязненности участка и автоматически выбирается подходящая интенсивность уборки.
Уровень шума
Несмотря на то, что роботы-пылесосы — не слишком мощные устройства, издаваемый ими уровень шума может оказаться достаточно сильным чтобы помешать, например, спящим людям. Поэтому, выбирая робот-пылесос, сверяемся с инструкцией: шум от 50 дБ и выше способен доставить ощутимый дискомфорт, особенно ночью. Поэтому мы рекомендуем ориентироваться на этот показатель и брать его за «средний».
Дополнительные опции и параметры
Поскольку роботы-пылесосы — это активно эволюционирующие гаджеты, нередко в них можно встретить необычные решения, практическая польза от которых не всегда очевидна. Давайте перечислим некоторые из них.
- Встроенная камера. На основе данных камеры робот пытается построить карту помещения и выбрать наилучший маршрут, а некоторые модели даже передают картинку на смартфон.

- УФ-обеззараживание. Если вы верите, что ультрафиолетовая лампа способна за несколько секунд убить вредные бактерии, то это вариант для вас. Остальным рекомендуем поинтересоваться возможностью отключения УФ-лампы (если она есть в интересующей вас модели), поскольку ее работа быстро разряжает аккумулятор.
- Автоматическое возвращение на базу. Практически все современные роботы-пылесосы оснащены «базой» — зарядной станцией, куда они автоматически возвращаются по завершении уборки или когда чувствуют приближение разряда аккумулятора. Бюджетные модели могут поставляться и без базы — в этом случае вам придется каждый раз самостоятельно искать робота в квартире и подключать его к проводной зарядке.
- Мощность зарядной станции может существенно различаться от модели к модели, а ведь от нее непосредственно зависит скорость зарядки! Допустимой считается полная зарядка за 5-6 часов, некоторым моделям бывает достаточно 3-4 часа. Тут мы немного недоумеваем: что не так с роботами-пылесосами и почему они не могут заряжаться так же быстро, как смартфоны? Однако пока что реальность такова, и приходится с ней мириться.


Стандартная зарядная станция
- Голосовое сопровождение. Нередко роботы пылесосы не только подают характерные свисты и попискивания, но и разговаривают человеческим голосом — сообщают, что́ они делают, или жалуются на возникшие проблемы. Ценность подобной функции, на наш взгляд, относится исключительно к персональным вкусам и предпочтениям: кому-то нравятся голосовые сообщения, а кого-то они раздражают, и вообще — проще запомнить, чем два коротких писка отличаются от трех длинных.
- Комплектация и наличие расходных материалов — довольно важный пункт. Будет очень неплохо, если в комплекте с новым роботом-пылесосом вы найдете комплект запасных щеток, сменную салфетку для влажной уборки и запасной HEPA-фильтр. Такой набор позволит отложить поход в сервисный центр за запчастями в случае, если комплектные износятся или придут в негодность. Если не лень, можно поинтересоваться наличием совместимых запчастей — нередко различные модели используют одинаковые фильтры и щетки, а это значит, что в случае необходимости найти нужные расходники на замену окажется проще (и, возможно, обойдутся они дешевле).

Набор запасных салфеток никогда не помешает
Выводы
Выбор робота-пылесоса на сегодняшний день остается довольно сложной задачей для пользователя. Основные причины — множество различных факторов, влияющих на конечный результат, и слабое понимание со стороны пользователя, какого результата он в принципе хочет добиться. Очевидным и бесспорным остается тот факт, что робот-пылесос на сегодняшний день — это не замена полноценному пылесосу, а, скорее, дополнительный помощник, который сделает ваш дом немного чище. Ну а выбор конкретной модели зависит от площади квартиры, от наличия или отсутствия домашних животных, от желаемой степени автоматизации, и т. д., и т. п. Несмотря на очевидную пользу, которую способны принести роботы-пылесосы, для многих они остаются «игрушкой», поэтому единые критерии, по которым можно было бы сравнить между собой все модели и решить, какая из них лучше, а какая хуже, придумать довольно сложно.
Как стать роботом за 12 простых шагов
Опубликовано в сентябре 2018 г. (выпуск 100) | 5010 слов
(выпуск 100) | 5010 слов
© 2014, Мерк Фенн Вольфмур. Первоначально опубликовано в Scigentasy . Перепечатано с разрешения автора.
Как сказать своему парню, что вы любите робота:
- Скажите ему: «Возможно, я люблю робота», потому что биологическому мозгу трудно обработать абсолютные значения. Он не будет ревновать.
- Спросите его, что он думает о гипотетической ситуации, в которой вы нашли кого-то, кто может и не быть человеком, но все же ценен и подходит вам. (Ваши так называемые романтические отношения такие же фальшивые, как и вы.)
- Ничего ему не говори. Дело не в том, что он скажет вам, что вы не правы; он не такой, как его родители или ваши. Но все еще существует статистическая вероятность того, что он не согласен с тем, что вы влюблены в робота.
• • • •
В моем списке дел на сегодня:
- Пригласить робота на свидание.
- Подберите ингредиенты для салата на ужин.
- Купите Мелинде и Кимберли свадебный подарок.
Робот представляет собой J-90 SRM, считающийся «блочным» и «олдскульным», вероятно, восстановленный из металлолома, окрашенный в ярко-фиолетовый цвет с логотипом кофейни на шасси. Квадратная голова робота имеет светодиодный экран, который приветствует клиентов с неизменной вежливостью и отражает их заказы. Ярко-синий смайлик никогда не меняется в верхнем углу экрана.
Всем известно, что J-90 SRM не являются обновляемым ИИ. У них есть базовые программы обслуживания клиентов и протоколы технического обслуживания оборудования.
Всем известно, что роботы в сфере услуг используются как дешевая инвестиция в рабочую силу и для повышения показателей удовлетворенности клиентов, чего они никогда не делают, потому что клиенты никогда не бывают довольны.
Все знают, что нельзя любить робота.
Я бросаю свою тарелку в автоматическую утилизацию, которая благодарит меня за переработку. Никто больше не ждет, чтобы оставить мусор, поэтому я сосредотачиваюсь на нем, готовясь вернуться к прилавку. J-90 SRM безучастно улыбается пустой передней стойке, ожидая следующего покупателя.
J-90 SRM безучастно улыбается пустой передней стойке, ожидая следующего покупателя.
Обед закончился. В воздухе пахнет эспрессо и горелым молоком. Я прихожу сюда не потому, что еда хорошая или кофе лучше. Неоново-фиолетовый декор лучше игнорировать.
За последнюю неделю я практиковал это перед стеной шестнадцать раз. У меня есть свой сценарий. Это просто. «Здравствуйте, я Тесла. Как я могу называть тебя?
И робот ответит:
Я скажу: «Приятно познакомиться».
И робот ответит:
Я скажу: «Я хотел бы знать, не хотите ли вы пойти со мной на прогулку в свободное от работы время, когда нам обоим будет удобно. Я хотел бы узнать тебя получше, если это приемлемо для тебя».
И робот ответит:
«Привет, Тесла».
Воображаемый разговор прекращается. Я моргаю, глядя на мусорное ведро, и смотрю вверх.
Мой парень здоровается с улыбкой, его руки засунуты в карманы джинсов, его плечи сгорблены, чтобы казаться меньше. При шести футах пяти и трехстах фунтах это никогда не помогает. Он такой же приятный и мягкий, как черный медведь в спячке. Сегодня на нем серая водолазка и мокасины, ветровка расстегнута.
Он такой же приятный и мягкий, как черный медведь в спячке. Сегодня на нем серая водолазка и мокасины, ветровка расстегнута.
«Привет, Джонатан».
Я не могу сейчас пригласить робота на свидание.
Чувство пустоты снова появляется в моей груди, где оно всегда сидит, когда я не вижу и не слышу робота.
«Ты все еще идешь сегодня на вечеринку к Эстебану?» — спрашивает Джонатан.
«Да».
Джонатан снова улыбается. — Тогда я заеду за тобой после работы.
— Звучит неплохо, — говорю я. — Нам пора идти, иначе я опоздаю.
Работает бухгалтером. Он хотел изучать робототехнику, но его родители будут платить за колледж, только если он получит практическую степень (его дедушка не одобряет роботов). Компьютеры обрабатывают цифры, а он управляет людьми.
Он всегда сдвигает обеденный перерыв, чтобы вернуться со мной. Мило. Джонатан может действовать как непроницаемый щит от непогоды, если пойдет дождь и я забуду свой зонт.
Но Джонатан не робот.
Он предлагает мне руку, как всегда, как джентльмен, и мы выходим из кофейни. Дверь желает нам хорошего дня.
Я не оглядываюсь на робота.
• • • •
Руководство для начинающих о том, как сымитировать свой путь через биологические социальные конструкции:
- Притворись, что ты не робот. Это трудно, и вы работали над этим двадцать три года. Вы похожи на Дейту, только наоборот.
- (В вашей голове отсутствуют протоколы. Вы не знаете, почему вы родились биологически или почему не хватает частей, и вы не совсем понимаете, как функционирует человеческое взаимодействие. Иногда вы можете притворяться. Иногда люди даже верят вам, когда Вы знаете. Вы никогда не верите себе.)
- Запомните достаточно данных о социальных сигналах и запустите распознавание лицевых мышц, чтобы знать, что и когда сказать.
- Это не всегда удается.
- Пример: К вам подходит женщина примерно вашего биологического возраста и начинает подробно объяснять, как она зла на своего парня. Пример: Парень виновен в том, что пользуется ее туалетными принадлежностями, такими как зубная щетка и расческа, когда приходит, и оставляет полотенца на полу в ванной. «Какая неряха», — говорит она, сжимая пиво, как дубинку. — Как вы управляете мужчинами? Вы спрашиваете, велела ли она ему принести собственную зубную щетку и расческу и повесить полотенца. Кажется, первый логичный шаг: фактическое общение. — Он должен это понять! она сказала. Ты смущен. Вы говорите, что, возможно, он не знает о протоколах, которые у нее есть. Она странно смотрит на вас, переводит дыхание и уходит.
- Теперь друзья женщины игнорируют вас, и вы замечаете их взгляды и неловкие паузы, когда находитесь рядом с ними. У вас нет выхода, потому что вы не ехали отдельно.
- Попроси своего парня больше не водить тебя на вечеринки.
 Пример: Парень виновен в том, что пользуется ее туалетными принадлежностями, такими как зубная щетка и расческа, когда приходит, и оставляет полотенца на полу в ванной. «Какая неряха», — говорит она, сжимая пиво, как дубинку. — Как вы управляете мужчинами? Вы спрашиваете, велела ли она ему принести собственную зубную щетку и расческу и повесить полотенца. Кажется, первый логичный шаг: фактическое общение. — Он должен это понять! она сказала. Ты смущен. Вы говорите, что, возможно, он не знает о протоколах, которые у нее есть. Она странно смотрит на вас, переводит дыхание и уходит.
Пример: Парень виновен в том, что пользуется ее туалетными принадлежностями, такими как зубная щетка и расческа, когда приходит, и оставляет полотенца на полу в ванной. «Какая неряха», — говорит она, сжимая пиво, как дубинку. — Как вы управляете мужчинами? Вы спрашиваете, велела ли она ему принести собственную зубную щетку и расческу и повесить полотенца. Кажется, первый логичный шаг: фактическое общение. — Он должен это понять! она сказала. Ты смущен. Вы говорите, что, возможно, он не знает о протоколах, которые у нее есть. Она странно смотрит на вас, переводит дыхание и уходит.• • • •
Джонатан и я отдыхаем на шикарном кожаном диване в его квартире. Он берет на себя большую часть, и я прижимаюсь к его боку. У нас есть миска попкорна, и мы смотрим повторы Звездный путь: Следующее поколение .
«Я хочу тебе кое-что сказать», — говорит он. Его плечи напряглись.
Я продолжаю смотреть телевизор. Он знает, что я обращаю внимание, когда он говорит мне что-то, даже если я не смотрю на него. «Хорошо.»
«Я . . ». Он колеблется. Борги снова стреляют по Enterprise . «Я встречаюсь с кем-то еще».
«Парень?» — с надеждой спрашиваю я.
«Ага. Я встретил его в спортзале. Его зовут Бернардо.
Я вздыхаю с облегчением. Секреты тяжелы и болезненны, когда приходится носить их с собой всю жизнь. (Мне приходится составлять списки, чтобы отслеживать свои.) «Я рад. Ты собираешься кому-нибудь рассказать?»
Он расслабляется и сжимает мою руку. «Только ты сейчас. Но, судя по тому, что он мне рассказал, его семья довольно благосклонна».
«Повезло», — говорю я.
Соскребаем лишнее масло с миски последними зернами попкорна.
Мы притворяемся, что встречаемся уже два года. Мы никогда не спали вместе. Это нормально. Мне нравится обниматься с ним, а он любит рассказывать мне о сумасшедших клиентах в своей фирме, и все думают, что снаружи мы совершенно очаровательная парочка гетеросексуалов.
Пустое место в моей груди становится больше, пока я смотрю на Дейту на экране. У данных есть вся команда Enterprise . У Джонатана сейчас Бернардо. Я не знаю, заинтересуется ли робот мной взамен. (Что, если робота нет?)
Комната сжимается передо мной, стены, выкрашенные умброй, и футбольные памятные вещи задыхаются. Я вскакиваю на ноги.
Джонатан выключает звук телевизора. «Что-то не так?»
«Мне нужно идти».
«Хочешь, я отвезу тебя домой?»
«Это в четырех кварталах отсюда». Но я ценю его предложение, поэтому добавляю: «Но спасибо».
Я нахожу свое пальто сваленным у двери, пока он несет миску с попкорном на кухню.
Джонатан прислоняется к стене, пока я тщательно зашнуровываю каждый ботинок, чтобы он был туго затянут. «Если хочешь поговорить, Тесла, я послушаю».
Я это знаю. Он вышел ко мне до того, как мы начали встречаться. Я сказал ему, что меня тоже не интересуют социально приемлемые отношения, и он рассмеялся и выглядел таким облегченным, что чуть не заплакал. Мы разработали тщательно продуманный план, публичная персона, которую наши семьи не возненавидели бы.
Мы разработали тщательно продуманный план, публичная персона, которую наши семьи не возненавидели бы.
Я не готов доверять ему так, как он доверяет мне.
«Спокойной ночи, Джонатан».
«Спокойной ночи, Тесла».
• • • •
Как сказать своему фальшивому парню, что вы хотите стать роботом:
- Скажите ему: «Я хочу быть роботом». Вы также можете сказать: «Я действительно робот, а не биологическая машина с женским телом», потому что это ближе к истине.
- Ничего ему не говори. Если вы это сделаете, вам также придется признать, что вы думаете о способах навредить себе, чтобы у вас был предлог заменить части тела частями машины.
- Кроме того, страховка вряд ли покроет ваш переход в робота.
• • • •
Этот кошмар мне снится все чаще и чаще.
Меня окружают роботы. Некоторые из них выглядят как J-90 SRM, некоторые — более новые андроиды, некоторые — компьютерные ядра, парящие в воздухе. Я единственный человек.
Я пытаюсь говорить, но у меня нет голоса. Я пытаюсь дотронуться до них, но не могу поднять руки. Я пытаюсь следовать за ними, пока они идут по холму и проходят через две огромные двери, похожие на светящиеся светодиодные экраны, но я не могу пошевелиться.
Вскоре все роботы ушли, и я остался один среди пустыни.
• • • •
Одиннадцать причин, по которым вы хотите стать роботом:
- Роботы логичны и знают свое предназначение.
- У роботов есть программа, которую они понимают.
- К роботам не предъявляются недостижимые стандарты, а затем их критикуют, когда они терпят неудачу.
- Роботов не калечат эмоции, которые они не умеют обрабатывать.
- О роботах судят не по тому, с какими половыми органами они родились.
- Роботы имеют прочные и долговечные механические корпуса. Они не обязаны заниматься сексом.
- Роботы не чувствуют вины (за существование, за неудачи, за то, что они не такие, как ожидалось).
- Роботы могут выполнять несколько задач одновременно.
- Роботы не всегда чувствуют себя в опасности.
- Роботы — это идеальные машины, способные и функциональные, и их можно починить, если что-то сломается.
- Роботы счастливы.
• • • •
Сегодня суббота, поэтому я пораньше отправляюсь в «Пурпурные бобы».
Робота здесь нет.
Я смотрю на полированный хром и пластик К-100, у которого лепное лицо, улыбающееся с гуманистическими чертами.
«Добро пожаловать в Пурпурную фасоль», — говорит новый робот веселым голосом, в котором есть интонация и нет той механической монотонности, которая мне так нравилась в старом роботе. «Я Джейни. Чем я могу служить вам сегодня?»
«Где J-90 SRM?»
Робби, бариста, работающий по выходным, склоняется над эспрессо-машиной и вздыхает. Она, должно быть, получила этот вопрос много. Паника в моей груди сжимается так сильно, что может сломать ребра на мелкие кусочки.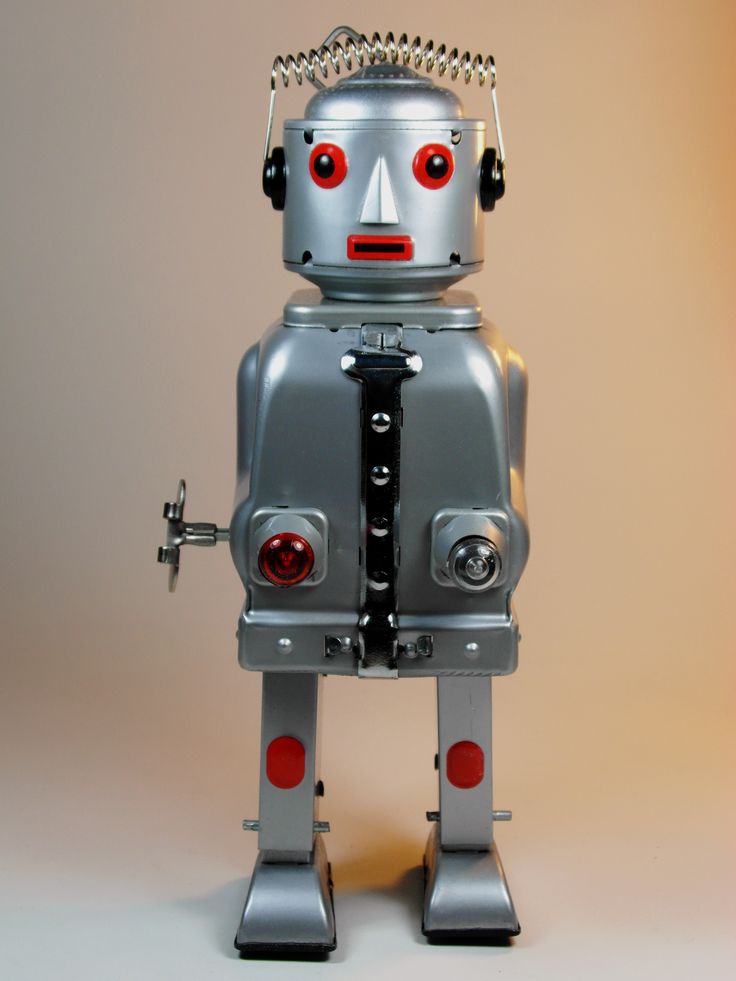 Почему они уволили робота?
Почему они уволили робота?
«Менеджер наконец-то добился обновления компании», — говорит Робби. «Нравится?»
«Где J-90 SRM?»
«Эх, переработанный, наверное». Робби пожимает плечами. — Хочешь как обычно?
Не могу смотреть на новый К-100. Это неправильно. Ему не место на месте робота, и мне тоже. «Мне нужно идти».
«Удачного дня», — говорит дверь.
• • • •
Как спасти робота от утилизации [уровень квалификации: средний]:
- Позвоните своему парню, у которого есть внедорожник, и попросите его отвезти вас на завод по переработке отходов Gates-MacDowell.
- Поспорить с техником, который отказывается продать вам списанного робота. По его словам, это корпоративный протокол, и роботы сферы услуг должны очищать процессоры и ядра перед переработкой.
- Соври и скажи, что хочешь купить J-90 SRM только потому, что собираешь коллекцию. Согласно закону, исторические коллекции освобождаются от стандартных процедур утилизации.
- Не применяйте физическое насилие к технику, когда он колеблется. Это грубо, и он просто делает свою работу.
- Не признавайся, что пригласила своего парня, потому что его размеры пугают, и он умеет выглядеть ворчливым в восемь утра
- Техник, наконец, согласится и выдаст вам талон.
- Проедьтесь и найдите робота на пристани.
- Не ломайтесь, когда увидите, насколько сильно поврежден робот: треснувший светодиодный экран робота, шасси робота, которое помялось внутрь, у робота отсутствует рука.
- Постарайтесь не верить, что это ваша вина. (Это нелогично, даже если у вас все еще есть блоки биологической обработки.)

• • • •
Два техника выкатывают робота и загружают его в машину Джонатана. Ощущение удушья не проходит. Робот выглядит таким беспомощным, закрытым и пустым на заднем сиденье. Я открываю корпус робота, но силового ядра нет вместе с программным модулем.
Робот — всего лишь оболочка того, чем когда-то был робот.
Мне хочется плакать. Я не хочу. Это неудобно и не решает проблемы.
«Что случилось, Тесла?» — спрашивает Джонатан.
Я закрыл шасси. Мои руки дрожат. «Они сломали робота».
— Все будет хорошо, — говорит Джонатан. Как будто сейчас все может быть в порядке. Как будто со мной все в порядке. — Ты можешь это исправить.
Я ерзаю обратно на пассажирское сиденье и хватаюсь за приборную панель. Он прав. Мы были друзьями, потому что нам обоим нравились роботы, и я проводил уроки обществознания в школе, изучая робототехнику и программирование.
«Я никогда не делал ничего такого сложного», — говорю я. Я только разобрал, реконструировал и восстановил мелкую бытовую технику и компьютеры. Никто никогда не позволял мне построить робота.
«Ты справишься, — говорит он. — А если тебе понадобится помощь, я знаю, к кому обратиться.
«Кто?»
«Хочешь познакомиться с моим парнем?»
• • • •
Необходимые вопросы к новому парню вашего парня (бывшему армейскому инженеру робототехники):
- Вы следили за развитием тел киборгов, поэтому спросите его, согласен ли он с оценками, которые Замена всех органических тканей, за исключением головного и спинного мозга, неорганическими механизмами произойдет в лучшем случае через десять лет. Некоторые ученые предсказывают более длительный срок. Некоторые предсказывают никогда, но вы им не верите. (Он ответит, что лучшее, что сейчас может предложить поле, — это конечности и некоторые искусственные органы.)
- Спросите его, как загрузить человеческое сознание в тело робота. (Он скажет вам, что пока нет реального способа сделать это, а технологии еще двадцать лет.)
- Не говорите ему, что вы не можете ждать так долго. (Вы не можете длиться вечно.)
- Вместо этого спросите его, может ли он достать вам детали, необходимые для ремонта робота.
 Некоторые ученые предсказывают более длительный срок. Некоторые предсказывают никогда, но вы им не верите. (Он ответит, что лучшее, что сейчас может предложить поле, — это конечности и некоторые искусственные органы.)
Некоторые ученые предсказывают более длительный срок. Некоторые предсказывают никогда, но вы им не верите. (Он ответит, что лучшее, что сейчас может предложить поле, — это конечности и некоторые искусственные органы.)• • • •
Бернардо — на шесть дюймов ниже и на сто фунтов легче Джонатана, татуированный от шеи до лодыжек, постоянно пахнущий сигаретами — частично робот. Он потерял правую руку в плечевом суставе в результате несчастного случая и теперь носит кибернетический протез. У него ограниченное сенсорное восприятие, но он говорит, что оно не так хорошо, как его старая рука.
Он мне нравится. Я говорю об этом Джонатану, и мой парень сияет.
Я говорю об этом Джонатану, и мой парень сияет.
«Они действительно выпотрошат эти штуки», — говорит Бернардо, сбрасывая блок питания.
(Хочу спросить у него, сколько я ему должен. Но когда он ничего не говорит о погашении, я молчу. Я не могу себе этого позволить. Может, он это знает.)
Ставим робота в запасную спальню в мою квартиру, которую Джонатан хотел превратить в офис, но так и не организовал себя достаточно, чтобы сделать это. Мне понравилась пустая комната, но теперь это дом робота. Я спрятала уведомления о просроченных платежах и просроченные счета в ящике стола до того, как Джонатан их увидел.
«Достать новую руку может быть непросто, но у меня есть приятель, который работает на свалке в штате Мэн», — говорит Бернардо. «Держу пари, она могла бы откопать нужные части модели».
«Спасибо».
Я собираюсь реконструировать старые пути личности и программирования. Существуют подсистемы, «нервные кластеры», которые служат для избыточной обработки. Модули личности направляются через функциональные программы, а остатки личности робота накапливаются в подсистемах. Более новые модели протираются полностью, а со старыми обычно не заморачиваются.
Модули личности направляются через функциональные программы, а остатки личности робота накапливаются в подсистемах. Более новые модели протираются полностью, а со старыми обычно не заморачиваются.
Бернардо потирает бритую голову. «Ты понимаешь, что это не будет быстрым и легким решением, верно? Может занять недели. Черт, это может даже не сработать».
Я провожу пальцем в воздухе перед темным светодиодным экраном робота. Я не смог спросить робота, есть ли у меня разрешение прикасаться к роботу. Меня беспокоит, что мне приходится заниматься запчастями и ремонтом без согласия робота. Это делает это неправильно? Починить робота, не зная, хочет ли робот починиться?
Возненавидит ли меня робот, если я добьюсь успеха?
— Я знаю, — шепчу я. — Но мне нужно спасти робота.
• • • •
Как сказать вашему притворному парню и его настоящему парню, что ваши внутренние процессоры дают сбой:
- Биологический термин депрессия , но у вас нет официальной диагностики (диагноза) и трудно сказать это слово. Он кажется тяжелым и обжигает рот. Например, когда вы пытались съесть батарейку, когда были маленькими, и ваши родители расстроились.
- Вместо этого вы пытаетесь скрыть это чувство. Но темное пятно уже растеклось по проводке и забило процессор. У вас нет доступа к каким-либо рабочим файлам справки, чтобы исправить это. Техническая поддержка недоступна для вашей модели. (Расширенной гарантии не существует.)
- Притворитесь, что у вас нет энергии из-за того, что вы больны обычным жуком.
- Тебе пора спать. Ваша работа сводит на нет многие из ваших функций; роботы могут выполнять уборку и техническое обслуживание в отелях для гораздо лучших инвестиций в заработную плату, а поскольку вы (пока) не робот, вы знаете, что вас скоро заменят.
- Дословный перевод слова «депрессия»: Вы сломлены и обесценены, и от вас больше нет никакой пользы.
- Никто не восстанавливает сломанных роботов.
- Пожалуйста, завершите работу самостоятельно.
 Он кажется тяжелым и обжигает рот. Например, когда вы пытались съесть батарейку, когда были маленькими, и ваши родители расстроились.
Он кажется тяжелым и обжигает рот. Например, когда вы пытались съесть батарейку, когда были маленькими, и ваши родители расстроились.• • • •
В свободное время я работаю над роботом.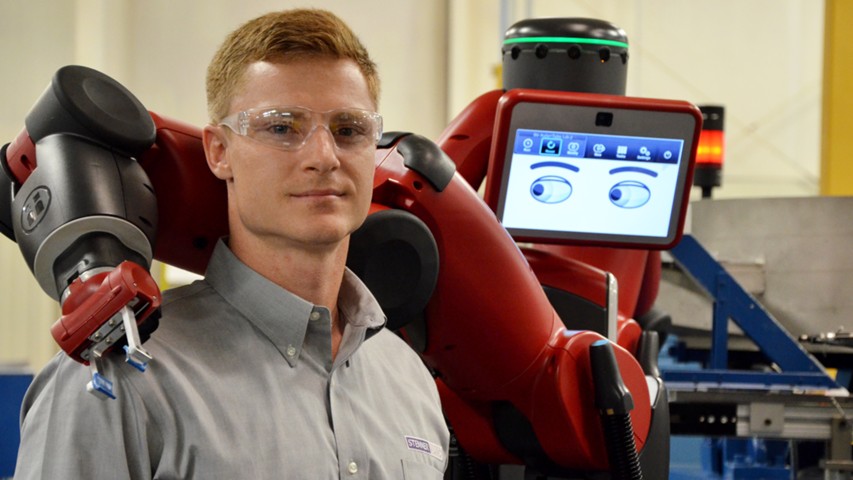 У меня его сейчас много. Работа с роботом — единственная причина, по которой мне приходится просыпаться.
У меня его сейчас много. Работа с роботом — единственная причина, по которой мне приходится просыпаться.
Мне нужно отремонтировать сломанные сервоприводы робота и собрать воедино память робота и программирование функций из того, что восстановил компьютер.
В моей голове все больше и больше списки подпрограмм:
- Вы не сможете починить робота.
- У вас недостаточно денег, чтобы починить робота.
- У вас нет навыка починки робота.
- Робот возненавидит тебя.
- Вы не робот.
• • • •
Бернардо и Джонатан на кухне. Они смеются и шутят, готовя жаркое. Я не голоден.
Я не голоден уже несколько дней.
«Вы должны просто купить новое ядро, Тесла», — говорит Бернардо. — Это избавит вас от многих головных болей.
Мне не нужно пустое программируемое ядро. Что мне нужно, так это робот, который работал в Purple Bean. Робот, который попросил мой заказ, как робот сделал каждый покупатель. Но в тот момент, когда я понял, что могу полюбить этого робота, он спросил, как бы я хотел, чтобы его называли. «Тесла», — сказал я, и голубой светодиодный смайлик в верхнем углу экрана робота замерцал в застенчивой улыбке.
«Тесла», — сказал я, и голубой светодиодный смайлик в верхнем углу экрана робота замерцал в застенчивой улыбке.
Всем известно, что роботы не люди.
На кухне тишина. Затем Джонатан тихо говорит: «Тесла, что это?»
Полагаю, он нашел уведомление о выселении.
• • • •
Причины, по которым вы хотите самоликвидироваться (неполный список):
- Еженедельное посещение дома ваших родителей в пригороде вызывает неизбежный вопрос о том, когда вы выйдете замуж за своего парня, остепенитесь (так что вы можете вытолкнуть детей) и создать семью.
- Не говорите им, что только что потеряли работу.
- Вы сделали ошибку, упомянув, что собираетесь на свадьбу своей лучшей подруги Мелинды на следующих выходных. Вы рады за нее: она наконец-то выходит замуж за свою давнюю подругу Кимберли.
- Это подталкивает твоего отца к очередному разглагольствованию о пороках геев и о том, что все они заслуживают смерти.
- (Вы слышали это всю свою жизнь. Вы думали, что сбежали, когда вам было восемнадцать, и переехали. Но вы никогда не сбегаете, не так ли? Спасения нет.)
- Вы делаете вторую ошибку и возражаете. Вы никогда этого не делали; безопаснее ничего не говорить. Но вы слишком напряжены, чтобы перестраховываться, поэтому говорите ему, что он неправ и что вам больно, когда он говорит это.
- Это делает его параноиком, и он требует, чтобы вы сказали ему, что вы тоже не один из этих педиков.
- Вы не говорите своим родителям, что вы, вероятно, асексуальны, и что вы действительно хотите быть роботом, потому что роботов никогда не осуждают из-за того, кого они любят.
- Вы перестаете слушать, когда он становится все громче и громче, злее и злее, пока не начинаете бояться, что он потянется за винтовкой в оружейном шкафу.
- Вы выбегаете из дома и вас чуть не сбивает грузовик. Рев рожков, и слякотный снег брызнет вам в лицо, когда вы доберетесь до безопасного тротуара на противоположной стороне.
- Хотел бы ты быть на три секунды медленнее, чтобы бампер не промахнулся. Это был большой грузовик.
- Вы начинаете составлять новый список.
 Вы думали, что сбежали, когда вам было восемнадцать, и переехали. Но вы никогда не сбегаете, не так ли? Спасения нет.)
Вы думали, что сбежали, когда вам было восемнадцать, и переехали. Но вы никогда не сбегаете, не так ли? Спасения нет.)
• • • •
«Почему ты мне не сказал?» — спрашивает Джонатан, больше обеспокоенный, чем сердитый. — Я бы помог.
Я пожимаю плечами.
Загружается список подпрограмм:
- Вы не взрослый, если не можете постоянно существовать независимо.
- Следовательно, по логике вещей, вы нерабочий дрон.
- Ты будешь обузой для всех.
- Вы уже есть.
- Самозавершение.
— Я думал, что справлюсь, — говорю я. Светодиодный экран робота все еще треснул и темный. Интересно, к чему снится робот.
Бернардо молчит на кухне, давая нам возможность уединиться.
Джонатан трет глаза. «Хорошо. Смотреть. Ты всегда можешь остаться со мной и Берном. Мы разберемся, Тесла. Разве не всегда?
Я знаю, какая у него маленькая квартира. Бернардо только что переехал к нему; места не осталось.
«А как насчет робота?» Я спрашиваю.
• • • •
Самоуничтожение: руководство для роботов.
- Повреждение водой. Большие водоемы вызовут короткое замыкание внутренних механизмов. У биологических объектов это называется утоплением . Рядом несколько мостов, а реки полноводные.
- Перегрузка. Подключение к источнику питания, выходящему далеко за пределы возможностей ваших цепей, например к электроизгороди промышленного класса. Один есть на заводе по переработке отходов Gates-MacDowell.
- Полный сброс мощности. Биологически это известно как кровопотеря. В ванной много бритвенных станков.
- Существенный физический урон. Достаточно будет взрывчатых веществ или дробления с помощью промышленных машин для переработки. Вариант: встать перед поездом.
- Удар с большой высоты; падение. Вы живете в очень высоком жилом комплексе.
- Повредите свои внутренние системы, проглотив химикаты промышленного класса. Известно, что кислота повреждает как органические, так и неорганические ткани.
- Заполните пропуск. (Совет: используйте Интернет.)

• • • •
Семья Бернардо владеет арендованным гаражом, и он использует один из них для ремонта своего нестандартного мотоцикла. Он говорит, что я могу оставить робота там, пока не откроется другой блок.
Джонатан переместил свою коллекцию памятных вещей Budweiser в хранилище, поэтому маленькая комната, в которой он хранил ее, теперь является неофициальной спальней. Он показывает мне его и говорит, что я могу переехать в любое время, когда захочу. Он и Бернардо делят его спальню.
Я не знаю, что делать.
У меня нет рабочих процедур для получения помощи.
Я должен самоуничтожиться и пощадить их всех. Так было бы проще, не так ли? Лучше для них?
Но робот еще не готов.
Я не знаю, что делать.
• • • •
Как вести неловкие разговоры о ваших отношениях с парнем и парнем вашего парня:
- Согласитесь переехать к ним. Временно. (Вы чувствуете, что навязываетесь. Постарайтесь не замечать, что они оба искренне рады, что вы живете с ними.)
- Закажи пиццу и смотри марафон Futurama по телевизору.
- Ваш парень говорит: «Я собираюсь открыться своей семье. Я написал обновление FB, и мне просто нужно нажать «Отправить».
- Парень твоего парня целует его, и ты бьешь их обоих кулаками на праздновании.
- Ты говоришь ему, что гордишься им. Вы будете первым, кому понравится его статус.
- Он публикует сообщение на своей стене. Вам сразу нравится обновление.
- (Вы не знаете, что это значит для вашего фасада парня/девушки.)
- Твой парень говорит: «Тесла, нам нужно поговорить. О нас. О нас всех троих. Вы знаете, что он имеет в виду. Где ты сейчас вписываешься?
- Вы говорите: «Хорошо».
- «Я полностью согласен с тем, что ты являешься частью этих отношений, Тесла», — говорит бойфренд твоего парня. «Кого волнует, что думают другие люди? Но это полностью зависит от вас».
- «То, что он сказал», — говорит твой парень. «Черт, ты тоже можешь ввести робота. Никто из нас не возражает против того, чтобы роботы были частью семьи». Он гладит кибернетическую руку своего парня. «Мы заставим это работать».
- Вы же не говорите: «Я могу быть роботом, и это нормально?» Вместо этого вы говорите им, что подумаете об этом.
 Постарайтесь не замечать, что они оба искренне рады, что вы живете с ними.)
Постарайтесь не замечать, что они оба искренне рады, что вы живете с ними.)
• • • •
Я пишу еще один список.
Записываю все списки. В целях. В деталях.
Затем я распечатываю их и отдаю Джонатану и Бернардо.
На обложке четыре буквы: H-E-L-P.
• • • •
Причины, по которым вам следует избегать самоуничтожения (прямо сейчас):
- Джонатан говорит: «Если вам когда-нибудь понадобится поговорить, я выслушаю».
- Бернардо говорит: «Будет лучше. Я обещаю, что это так. Я был там, где и ты, думая, что есть не что иное, как весь мир, трахающийся с тобой. Я был в аду все свое детство и всю среднюю школу». Он покажет вам шрамы на своих запястьях и горле, его татуировки никогда их не скрывают. «Я знаю, что это чертовски больно. Но есть люди, которые любят вас, и мы готовы помочь вам выжить. Ты достаточно силен, чтобы сделать это».
- Твоя лучшая подруга Мелинда говорит: «Кто еще будет писать мне язвительные сообщения, пока я на работе, или ходить со мной на фильмы ужасов (вы же знаете, моя жена их ненавидит), или ходить с нами в походы каждое лето, как мы с тех пор, как нам исполнилось десять? И она протянет руки и скажет: «Ты заслуживаешь счастья. Пожалуйста, не уходи».
- Вы получите другую работу.
- Вы снова сможете функционировать, если дадите себе время и позволите друзьям помочь. И они будут. Они уже делают.
- Ты нужен роботу.
- Потому что, если вы уничтожите себя, у вас не будет шанса стать роботом в будущем.
 «Я знаю, что это чертовски больно. Но есть люди, которые любят вас, и мы готовы помочь вам выжить. Ты достаточно силен, чтобы сделать это».
«Я знаю, что это чертовски больно. Но есть люди, которые любят вас, и мы готовы помочь вам выжить. Ты достаточно силен, чтобы сделать это».• • • •
— Привет, Тесла, — говорит Джонатан, выглядывая из-за двери гаража-мастерской. «Берн и я идем к его родителям на ужин. Хочу прийти?»
«Эй, я приду за тобой в любое время», — зовет Бернардо с парковки.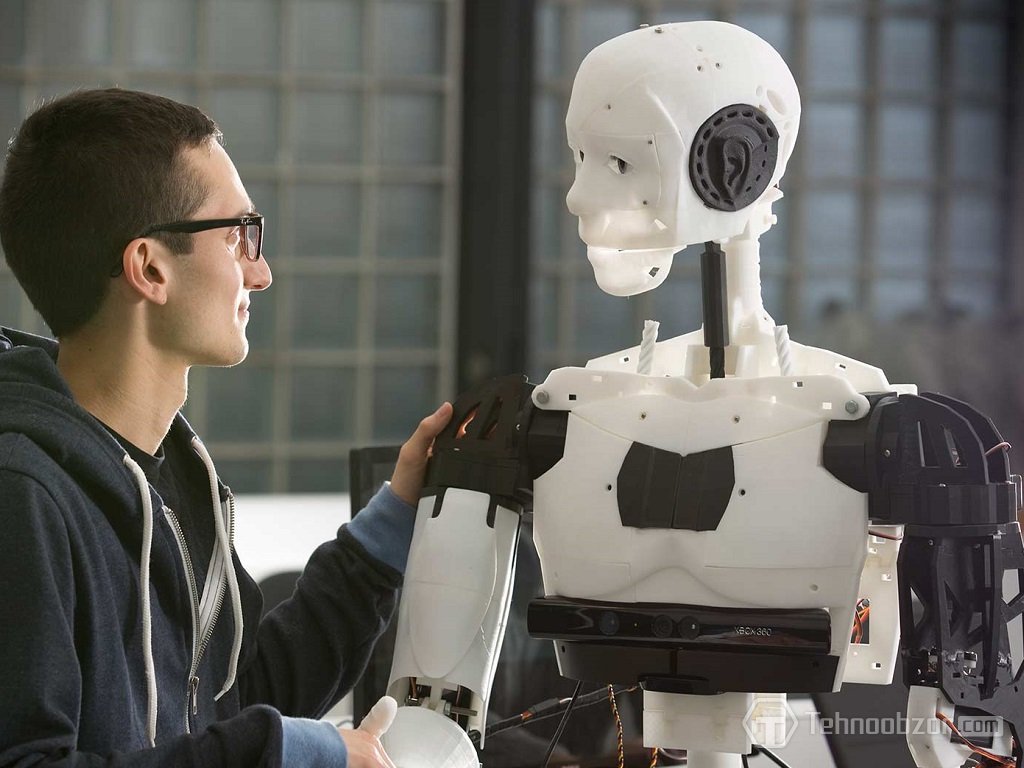
Джонатан закатывает глаза, его дурацкая улыбка шире, чем когда-либо.
Я качаю головой. Робот почти готов. «Ребята, веселитесь. Передай привет от меня».
«Еще бы».
В гараже тихо. Готовый.
Я сижу у электросети. Я отключил все остальные устройства, выключил телефон и дата-хаб. Я тщательно спрятал велосипед Бернардо за пластиковой перегородкой, которую он использовал для разделения гаража, чтобы у каждого из нас было рабочее место.
Мы одни, робот и я.
Я подключаю дополнительный внешний источник питания и продолжаю диагностику на специальном компьютере.
Робот стоит неподвижно, светодиодный экран пустой. Он все еще треснул, но он будет работать.
«Ты меня слышишь?» Я спрашиваю. «Ты здесь?»
Робот:
Я включаю робота и ввожу последовательность загрузки, переустанавливая спасенное ядро памяти.
Экран робота мерцает. В центре появляется голубой смайлик, рассеченный трещинами паутины.
— Привет, — говорю я.
«Привет, Тесла», — говорит робот.
«Как вы себя чувствуете?»
«Я в порядке», — говорит робот. — Я верю, что ты спас мне жизнь.
Дыра в моей груди закрывается, совсем чуть-чуть.
Чистые, симметричные линии робота и матовая фиолетовая поверхность светятся. Робот идеальный. Я встаю.
«Как я могу отблагодарить тебя за помощь, Тесла?»
«Могу ли я тоже стать роботом?»
Пиксельное лицо робота смещается; теперь выражение лица робота хмурится. «Я не знаю, Тесла. Я не запрограммирован с такими знаниями. Мне жаль.»
Я думаю о спекулятивных технических статьях, которые я читал, о статьях, которые мне прислал Бернардо.
«У меня есть гипотеза», — говорю я роботу. «Если бы я мог питать себя достаточным количеством электричества, мои электромагнитные мыслеформы могли бы перемещаться в механические устройства, такие как компьютерный концентратор».
(Загрузка сознания пока невозможна.)
«Я считаю, что такая процедура может повредить вашу нынешнюю органическую оболочку», — говорит робот.
Да, я понимаю воздействие электрического тока на биологические ткани. Я думал об этом раньше. (Много раз. Все время.)
Робот говорит: «Могу ли я предложить вам подумать над этим вопросом, прежде чем делать что-либо прискорбное, Тесла?»
И я отвечаю:
Робот говорит: «Мне бы не хотелось, чтобы вас депрограммировали и отправили на завод по переработке органических тканей».
А я отвечаю:
Робот говорит: «Мне будет грустно, если ты умрешь».
Я смотрю на нахмуренное синее пиксельное лицо. И я думаю о Джонатане и Бернардо, вернувшихся и обнаруживших мое одеревеневшее и почерневшее тело, мои пальцы подключены к электросети.
Робот протягивает одну блочную руку. «Может быть, мне позволят разработать более надежное решение? Я хотел бы лучше понять вас, если это приемлемо». Синие линии изгибаются в обнадеживающей улыбке.
Робот все еще здесь. Джонатан и Бернардо здесь. Мелинда и Кимберли здесь. Я не робот (пока), но я не одинок.
«Это приемлемое решение, Тесла?» — спрашивает робот.
Я беру робота за руку, и грубые пальцы робота медленно обвивают мои. «Да. Я бы очень этого хотел». Затем я спрашиваю робота: «Как бы ты хотел, чтобы я тебя называл?»
• • • •
Как стать роботом:
- Нет.
- Еще нет.
- Но ты будешь.
Понравилась эта история? Поддержите нас одним из следующих способов:
- Buy eBook
- Direct (ePub/Mobi/PDF)
- Amazon (Kindle)
- Barnes & Noble (Nook)
- Weightless (ePub/Mobi)
- Kobo (ePub)
- Trade Paperback
ПодписатьсяPatreon
Распространяйте информацию!
Что изучать для карьеры робототехники?
Какие навыки необходимы для работы с роботами?
Какие предметы следует изучать?
Как начать карьеру своей мечты в области робототехники?
С тех пор, как мы опубликовали первую версию этой статьи еще в 2015 году, она стала одной из наших самых популярных статей.
И легко понять, почему.
Будущее за роботами. Роботы уже здесь. Роботы повсюду!
Многие люди, как и вы, заинтересованы в карьере робототехники.
Но с чего начать? В наши дни существует так много предметов для изучения, что очень трудно понять, какой предмет является правильным, который даст вам необходимый старт.
Давайте рассмотрим различные пути, которые вы можете выбрать для карьеры в области робототехники, и навыки, которые вам понадобятся, чтобы стать инженером-робототехником.
Кто работает в робототехнике?
Инженеры-робототехники учатся.
Инженеры-робототехники — мастера на все руки.
Инженеры-робототехники знают немного обо всем (по крайней мере, обо всем, что важно для робототехники).
Они являются связующим звеном между машиностроением, электротехникой, информатикой и даже психологией.
Робототехника включает в себя гораздо больше, чем просто «строительство роботов». Чтобы стать инженером-робототехником, вы должны иметь целый ряд различных навыков и областей знаний. Есть 10 основных навыков, которыми должны обладать все хорошие робототехники.
Есть 10 основных навыков, которыми должны обладать все хорошие робототехники.
Конечно, другие профессии в области робототехники не связаны с профессией инженера-робототехника. Вы можете быть техником-робототехником, программистом или даже оператором робототехники (в наши дни это может быть практически любой человек). Не для всех профессий в области робототехники вам потребуется высшее образование. Некоторые из них возможны только при наличии правильных основных предметов в старшей школе.
Как начать заниматься робототехникой
Робототехника — непростая карьера. Это действительно междисциплинарная карьера. Этим она отличается от многих традиционных профессий.
Хочешь стать врачом? Изучать медицину.
Хочешь строить мосты? Изучайте гражданское строительство.
Вы хотите работать с роботами? Ну… вы можете изучать электронику, информатику, биотехнологию, производство, когнитивистику…
… есть множество путей к работе в области робототехники!
Основные предметы для старшеклассников
Начнем с изучения уровня обучения в старших классах.
Что можно посоветовать тем, кто интересуется робототехникой и хочет выбрать школьные предметы?
На самом базовом уровне есть 2 основных предмета, которые вам необходимы для начала работы в робототехнике:
- Математика — Это обязательно. Вам не обязательно быть Джоном Нэшем — известным американским математиком, — но хорошее знание алгебры и геометрии необходимо для изучения всех предметов, составляющих робототехнику.
- Физика (или другая наука) — Если вы хотите работать в любой области техники, важно хорошо разбираться в науке. Физика особенно полезна, потому что она дает фундаментальные знания в области энергетики, электрических цепей, механики, материаловедения и других ключевых тем для робототехники. Однако все науки полезны, поскольку они учат применять математику к реальным проблемам.
Другие полезные школьные предметы
В каждой стране есть свой набор предметов, которые преподаются в школах, поэтому сложно составить список, который подходит для всех. Вместо этого вот 3 навыка, полезных для робототехники, и некоторые предметы, которые их обеспечивают:
Вместо этого вот 3 навыка, полезных для робототехники, и некоторые предметы, которые их обеспечивают:
- Вычисления и программирование — Программирование важно для робототехники, поэтому такие предметы, как информатика и информационные системы, являются отличным выбором.
- Дизайн и технология — Предметы, которые могут повысить практическую сторону инженерии, включают дизайн продукта, графическую коммуникацию, технологические исследования и производство.
- Специальные инженерные дисциплины — В некоторых школах преподаются предметы по специальным инженерным дисциплинам, таким как автомобилестроение, биоинженерия, электроника, мехатроника и машиностроение. Все это может быть полезно для начинающих робототехников.
На уровне колледжа вы, возможно, захотите ознакомиться с нашей статьей 6 специальностей колледжей, которые готовят лучших сотрудников робототехники.
изображение: mit. edu
edu
Выбор степени в области робототехники
В робототехнике есть 3 основных дисциплины: механика, электроника и информатика.
В университете я выбрал пятилетнюю степень магистра в области робототехники, которая уделяла одинаковое внимание трем основным областям. В то время я полагал, что именно так люди попадают в робототехнику. Однако вскоре я обнаружил, что мой маршрут далек от стандартного. Большинство людей, работающих в области робототехники, прибыли одним или несколькими из следующих путей, пройдя курсы бакалавриата и магистратуры.
В каждом маршруте основное внимание уделяется изучению различных основных частей робототехники:
- «Тело» — Машиностроение — Эта отрасль инженерии изучает физические системы, из которых состоит робот. Такие подтемы, как механика, инженерия материалов и производство, являются ключевыми для промышленной робототехники. Часто курсы машиностроения будут специализироваться на мехатронике или робототехнике, но они, как правило, сосредоточены в основном на физическом проектировании и приведении в действие.
- «Нервная система» — Электротехника и электроника — Эта отрасль техники дает вам основы электроники, встроенных систем, низкоуровневого программирования и теории управления. Часто курсы электротехники также предоставляют специализации в области робототехники или автоматизации, которые будут сосредоточены на управлении роботами, а не на механическом проектировании.
- «Мозг» — Информатика — Похоже, что многие люди, занимающиеся исследованиями, занимаются робототехникой через информатику. Эта тенденция, вероятно, сохранится, поскольку стандартные роботизированные аппаратные платформы станут нормой. Общие платформы смещают фокус исследований с физического оборудования и вместо этого позволяют исследователям сосредоточиться на программном обеспечении и высокоуровневом программировании. Часто эти курсы будут включать темы программирования роботов, такие как искусственный интеллект и дизайн программного обеспечения. Обычно именно на этом уровне обучения люди с опытом работы в области психологии и смежных областях могут поступить в робототехнику на курс магистратуры последипломного образования.

Это ядро 3, но есть и много других путей, которыми вы могли бы пойти, чтобы закончить работу в робототехнике.
Например, просто взгляните на 25 лучших женщин в области робототехники, и вы найдете людей, которые начали изучать:
- Физика (например, Од Биллар из EPFL и Арианна Менчиасси из Scuola Superiore Sant’Anna)
- Когнитивные науки и психология (например, Лейла Такаяма из Google X)
- и даже социологии и социальной психологии (например, Астрид Вайс из Венского технологического университета).
Другие громкие имена в области робототехники также начинались с таких степеней, как:
- Чистая математика (например, Родни Брукс из Массачусетского технологического института)
- Юриспруденция (например, Райан Кало из Юридической школы Университета Вашингтона)
- и гражданское строительство (например, Радж Редди, лауреат премии Тьюринга).
Какой бы путь вы ни выбрали, убедитесь, что вы продолжаете развивать свои знания и во всех других областях.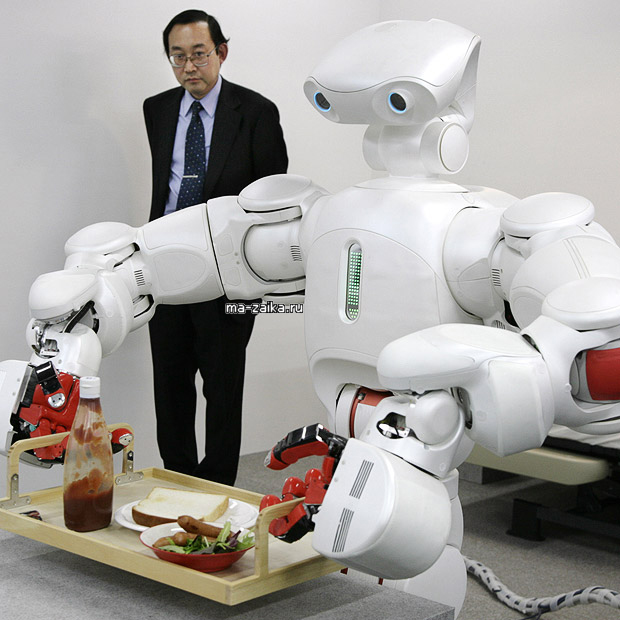 Конечно, вы никогда не станете ведущим специалистом во всех подобластях робототехники, но развитие себя как компетентного ученого-компьютерщика, инженера-электрика и инженера-механика поставит вас в прекрасное положение, когда вы продолжите специализироваться во всех сферах своей деятельности. карьера.
Конечно, вы никогда не станете ведущим специалистом во всех подобластях робототехники, но развитие себя как компетентного ученого-компьютерщика, инженера-электрика и инженера-механика поставит вас в прекрасное положение, когда вы продолжите специализироваться во всех сферах своей деятельности. карьера.
Как выбрать подходящую специальность по робототехнике
Многие люди прокомментировали эту статью с тех пор, как мы впервые опубликовали ее. Многие из этих комментариев в основном задают следующий вопрос:
«Какое высшее образование мне выбрать?»
Хотя мне всегда приятно слышать об интересе людей к робототехнике, основной ответ на этот вопрос таков: «Я не знаю, какую степень вам следует выбрать».
Как вы видели, есть много степеней, которые могут дать вам доступ к робототехнике. Вам нужно выбрать тот, который лучше всего соответствует вашим интересам. Ответ также будет зависеть от того, какие курсы доступны в вашей части мира.
Чтобы помочь вам принять решение, я написал две дополнительные статьи:
- Как выбрать курс обучения робототехнике: какая специализация? — Эта статья содержит упражнение, которое вы можете использовать, чтобы выяснить, какая область робототехники вас больше всего интересует.
- Как выбрать степень по робототехнике: ответы на 3 основных вопроса — ответы на 3 наиболее распространенных вопроса, которые мне задают о том, как выбрать лучшую степень для ваших нужд.
Если вы все еще застряли, пожалуйста, прочитайте комментарии других людей к этому сообщению и мои ответы на них. У них можно многому научиться!
Жизненно важное значение внеклассной игры на скрипке
Что бы вы ни изучали, есть один аспект обучения робототехнике, которым часто пренебрегают.
Загляните в Уголок карьеры НАСА, и вы получите несколько полезных советов от профессионалов в области робототехники о том, как начать работу в робототехнике. Многие из них рекомендуют внеклассный практический опыт работы с роботами на протяжении всего обучения.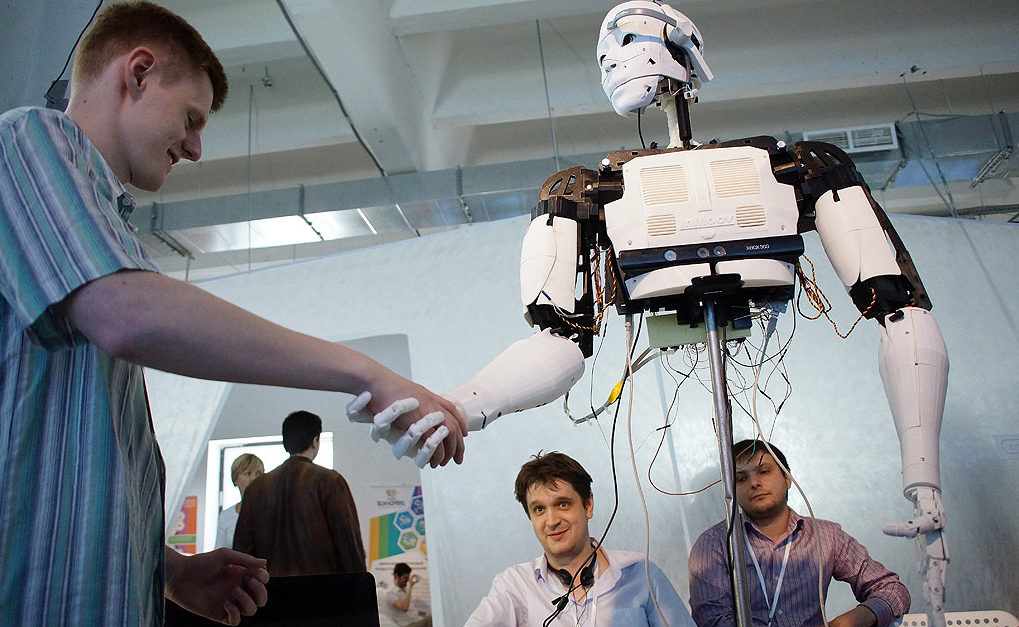
Я называю это «внеклассной игрой на скрипке».
Получение физического опыта работы с роботами, электроникой, программированием и механикой необходимо для полного понимания теории робототехники. Это также позволяет вам узнать, какие области робототехники вас действительно больше всего интересуют.
Наборы роботов, такие как Lego Mindstorms, — это хорошее место, чтобы начать играть с робототехникой дома, как и встроенные системы, такие как Raspberry Pi.
Один из лучших способов получить практический опыт — принять участие в одном из многочисленных соревнований по робототехнике, доступных для людей разного возраста и уровня образования. Если вы знаете других людей, интересующихся робототехникой, почему бы не собрать команду и не поучаствовать?
На самом деле есть много способов начать заниматься робототехникой. Главное — дополнять свои знания практическими занятиями и продолжать учиться!
Какой совет вы бы дали тому, кто хочет начать заниматься робототехникой? У вас есть вопросы о том, как начать? Как вы начали заниматься робототехникой? Расскажите нам в комментариях ниже.
Если кто-то из ваших знакомых заинтересован в карьере робототехники, передайте ему ссылку на этот пост. Спасибо.
Как построить робота
Удостоенный наград автор Последняя книга Ив Л. Юинг представляет собой иллюстрированный роман для среднего класса о забытом самодельном роботе, который оживает как раз тогда, когда это нужно начинающему ученому пятого класса Майе. друг и проект научной ярмарки. Опубликованная издательством Penguin Random House в июле 2021 года книга «Майя и робот» — это история о сообществе, адаптации к изменениям и магии изобретательности, которая напоминает юным читателям, что они всегда могут обратиться к собственному любопытству, когда чувствуют себя потерянными.
Ева Л. Юинг — доцент Школы социальной работы, политики и практики семьи Краун Чикагского университета. Она является качественным социологом образования, чья стипендия, общественная работа и преподавание в классе направлены на расширение возможностей, которыми заинтересованные стороны городских школ, другие исследователи и широкая общественность могут быть оснащены для понимания, реагирования и, в конечном итоге, ликвидации превосходства белых, и сделать школьные системы освободительными институтами, а не репрессивными.
Ее книга Призраки на школьном дворе: расизм и закрытие школ в южной части Чикаго была опубликована издательством University of Chicago Press в 2018 году. Премия Дэвиса-младшего за выдающуюся книгу Американской ассоциации преподавания и учебных программ.
Пишет и в других жанрах для широкой аудитории: автор сборников стихов Электрические арки и 1919 и написал серию Ironheart и Champions для Marvel Comics.
Профессор Ева Л. Юинг Увеличила масштаб с сотрудником Crown Family School Джули Юнг, чтобы обсудить Майю и робота .
***
Джули: В вашей литературной работе есть тема роботов. Вы когда-нибудь строили робота?
Ева: Никогда! Но я люблю роботов. Я люблю науку. Свою педагогическую деятельность в начальной школе я начал учителем естественных наук. Ну, моя учительская карьера в средней школе в качестве учителя естественных наук. И еще одна вещь, которая вдохновила Майя и робот заключается в том, что, когда я был учителем естественных наук, я действительно хотел, я действительно хотел , чтобы у меня было больше книг, которые представляют большое научное содержание в контексте действительно хорошей истории.
Когда я был ребенком, я изучал определенные научные дисциплины с помощью увлекательной литературы, и мне хотелось, чтобы в моем классе было больше романов и таких вещей, как Майя, которые познакомили бы детей с научными понятиями в интересной форме. Вы знаете, вся концепция добавления капусты в смузи немного? И мне было трудно найти такие хорошие книги. И так, и я всегда искал их. Это одна вещь, которая вдохновила меня на эту книгу.
В книге также немало настоящей науки. И одним из консультантов была Лия Каслберри, MPP 2020, выпускница Чикагского университета, которая работала в области машинного обучения и искусственного интеллекта. Она прочитала книгу и предложила места, где можно по-настоящему развить науку, что было очень полезно. Я также вспомнил о многих науках, которыми я интересовался, когда был в возрасте Майи, и о том, как я мог круто представлять научные идеи. А потом я просто обожаю роботов. Я думаю, что роботы — это круто. Сам я никогда не встречал. Ха! Это было бы восхитительно.
Джулия: Итак, кроме разговора с Лией, какие еще исследования и источники вдохновения вы черпали при написании книги?
Ева: Я провела много исследований о различных видах роботов и многое узнала о разных видах роботов, когда писала эту книгу, так что это было очень весело. И одной из вещей, которые на самом деле вдохновили на создание книги, была моя племянница. Когда ей было около двух или трех лет, она увлеклась роботами. И это было так случайно. Вы знаете, дети получают эти случайные навязчивые идеи. Для нее это были не динозавры. Это были не поезда. Это были роботы, и они появились совершенно неожиданно. И любую игрушку, любые кубики, она всегда складывала и говорила: «Это робот. Это робот». На самом деле, когда она была совсем маленькой, она говорила «Робок», что было очень мило. Итак, когда ей было четыре или пять лет, я отвел ее в Музей науки и промышленности, где в то время была действительно замечательная выставка роботов. И был этот робот, который бродил по выставке сам по себе, но он не был похож на робота. Он выглядел как очиститель воздуха, или кондиционер, или что-то в этом роде, но он не был похож на мультяшную версию робота. Но он говорил, и его работа заключалась в том, чтобы просто кататься и рассказывать людям разные факты о разных частях выставки. И моя племянница была примерно такого же роста, как этот маленький робот-кондиционер… У меня есть фотография, как она ходит, держа руку на этом роботе, и разговаривает с ним… и она начала переводить для других детей, например: «Он говорит, что хочет, чтобы мы пошли». вон там. Он говорит, посмотри на это. И она потратила 20 минут, просто следуя за этим роботом и разговаривая с ним. Некоторое время спустя мы проезжали мимо музея, и она откинулась на спинку сиденья в задней части машины, тяжело вздохнула и сказала: «Я просто хочу, чтобы у меня был робот, который везде будет со мной и будет моим другом». И я не мог выкинуть из головы образ этой маленькой девочки и ее робота. Я знал, что хочу написать книгу для детей. Это было в 10-летнем или 15-летнем плане. Но я не мог перестать думать об этой девочке и ее роботе, который вскоре превратился из моей племянницы в своего рода вымышленную фигуру, ну, знаете, мальчика и его собаку. У нас есть миллион историй о мальчике и его собаке, но я никогда не читал книги о девочке и ее роботе, понимаете? И поэтому я просто не мог перестать думать о них, о них двоих. И они были так очаровательны и так настойчиво отказывались покидать мою голову, что я подумала, о боже. Теперь я должен написать эту книгу.
А еще я родился в 80-х… Не знаю, помните ли вы ситком «Маленькое чудо», очень плохой ситком о семье, где их дочь — робот. Здесь нет компьютерной графики, спецэффектов и прочего. Шоу — своего рода шутка Амелии Беделии о персонаже, который всегда воспринимает вещи слишком буквально. Вы знаете, классический персонаж рыбы из воды, который всегда все портит. И поэтому я всегда знал с самого начала, что именно таким я хотел, чтобы Ральф [Робот] был. Он всегда пытается быть хорошим другом для Майи, и он любит ее, но он не совсем понимает человеческое, и он это понимает. Так вот откуда эта история.
Джули: Давайте поговорим о центральных темах Майя и робот …
Ева: Да, темы в моей книге посвящены управлению чувствами — особенно горю и насилию с применением огнестрельного оружия. А потом дружба. Я бы сказал, что это книга о дружбе.
Джулия: Какое место занимает эта книга в мире книг для детей среднего школьного возраста, и, в частности, какое место она занимает с точки зрения того, как Майя справляется с горем?
Ева: 907:10 Это роман для среднего класса, так что это как второй, третий, четвертый, пятый класс. Я говорил о 8-12- или 7-12-летних детях. Одна из вещей, которая всегда была важна для меня как педагога и человека, заботящегося о детях, заключается в том, что когда мы думаем о мистере Роджерсе, или Улице Сезам, или даже просто о взрослых в нашей жизни, которые любят нас, мы дорожим моментами детства, когда нам безоговорочно говорят, что наши чувства обоснованы и в порядке, и что переживать определенные вещи нормально, что это не ваша вина. Иметь человека, который помогает вам обрабатывать эти вещи таким образом, чтобы принимать и подтверждать. И поэтому одна из вещей, о которых я думал о том, как включить проблему насилия с применением огнестрельного оружия в книгу, это то, что я думал о том, как люди теряют свою жизнь, будь то из-за насилия, будь то из-за болезни, будь то из-за несчастных случаев, что угодно то обстоятельство, что всегда есть так много молодых людей, которые любили этого человека и были тронуты этим человеком в сообществе, у которых может быть или не быть возможности осознать, что произошло. Я помню, когда Хадию Пендлтон убили, я был учителем шестого, седьмого и восьмого классов в домашней комнате восьмого класса. Я поддерживал связь со своими восьмиклассниками после того, как они закончили школу, и пара из них пошла в ту же школу, что и Хадия, а один из них был в группе и выступал с ней. Я помню, как один из них сказал: «Я боюсь, что умру». И не то чтобы это был ее лучший друг или что-то в этом роде, понимаете? Она была просто членом этого сообщества, и это заставило меня много думать о том, что я буду чувствовать. Конечно, у вас будет этот страх. И как, думая о горе и травме, делаем ли мы достаточно хорошую работу по созданию пространства для молодых людей, которые могут просто наблюдать за происходящим издалека? Они могут не быть членами нуклеарной семьи или ближайшими друзьями, но они все равно страдают, потому что волновые последствия этого вреда настолько велики. И тогда возникает вопрос, делаем ли мы достаточно, чтобы выслушать и подтвердить, как молодые люди могут обрабатывать этот опыт.
Итак, в моей книге Майя оказывается в таком положении, когда на нее повлияла смерть кого-то, кого она никогда не встречала. И то, как взрослые разговаривают с ней, их ожидания от нее и то, как они к ней относятся, окрашено этой потерей, которую все взрослые чувствуют, но никто из них на самом деле не обсуждал с ней. В моем собственном детстве я помню много случаев, когда мне казалось, что нам не разрешено спрашивать об определенных вещах или говорить об определенных вещах, которые могут быть табу. И в детстве вам остается как бы понять это как можно лучше без особого руководства. Поэтому я надеюсь, что одна из вещей, которые книга сделает, — это дать пространство и признание молодым людям, которые, возможно, испытали подобную потерю, и дать взрослым в их жизни инструмент, чтобы открыть это пространство для разговора и сказать: «Это хорошо, о чем можно поговорить».
Джулия: Кажется, что не хватает книг о том, как справляться с насилием и травмами в обществе. Было ли это одной из других причин, по которой вы это написали?
Ева: Ага. Я думаю, как общество, мы довольно плохо говорим о горе в целом. Одна из огромных проблем последних полутора лет — это осознание того, насколько тяжелым может быть бремя горя и что у нас не всегда есть действительно хорошие культурные сценарии для решения этой проблемы. Более того, я думаю, что частично я надеюсь, что книга покажет то, чему учит Майя, что наша жизнь и влияние, которое мы оказываем на других людей, выходит за рамки того, что нам очевидно.
Я также хочу предложить детям способ изменить свое отношение к горю и утрате. Разные культурные традиции, разные религиозные традиции имеют язык для размышлений о том, как и когда закончилась чья-то земная жизнь, это не значит, что они совсем ушли от нас. Итак, на Майю повлияло то, что этот человек [Кристофер, блестящий ученый и создатель робота Ральфа] ушел. Она узнает, что у нее, в свою очередь, есть возможность и возможность использовать свои собственные дары, чтобы оказывать влияние на других людей. Я хочу открыть пространство, чтобы поговорить о горе, а также переосмыслить то, как мы думаем не только о горе, но и о наследии и наследии, которое мы оставляем после себя, когда уходим с одного плана существования.
Джули: Майя будет казаться очень реальной и близкой людям, которые выросли в Чикаго. Мне нравится отсылка к Sears Tower. Жители Чикаго это оценят. А еще есть другие вещи, такие как магазин всего. Все помнят, что у них был магазин всего… но эта часть Чикаго исчезает.
Ева: Я знаю. Ну, эта часть определенно немного автобиографична. Я представляю, как мой район растет как квартал Майи. И да, я помню, как только что пошел в магазин на углу, и они продали все. Когда я впервые начал заниматься рукоделием и пряжей, у меня была возможность пойти в магазин на углу и купить это… и в южной части Чикаго есть так много видов того, что я бы назвал «торговыми станциями», где люди просто на углу продают все. Так что Мистер Мак и его «магазин всего» определенно вдохновлены этими двумя вещами. Идея, что он в основном начал на углу, просто продавая носки, компакт-диски, зубную пасту, что угодно, вы знаете, масла, духи, масло ши. И затем, в конце концов, у него появляется собственная витрина, и у него есть магазин всего.
Джули: Отношения Майи и мистера Мака перерастают в отношения внука и ее дедушки. У вас был Мистер Мак в качестве суррогатного дедушки?
Ева: Я выросла в Чикаго, в основном меня воспитывала мама, и у меня хорошие отношения с отцом. Мои родители оба изначально переехали сюда из другого штата, поэтому, когда я рос, у нас не было большой семьи. У меня не было тетей, дядей и двоюродных братьев, которые жили в том же городе, что и я. И моя мать очень зависела от многих взрослых в нашей жизни. У меня было много «теток таких-то», которые биологически не были моими тетушками. Это были люди, которых моя мама завербовала в нашу семью, потому что ей нужна была помощь. И еще одна вещь, которой я хочу отдать дань уважения в истории Майи, это то, что мистер Мак — это человек, который не связан с Майей биологически, но он чрезвычайно важный взрослый в ее жизни. Я верю в необходимость воздать должное тем взрослым, которые не являются нашими биологическими родственниками, но действительно играют очень серьезную роль в нашем воспитании и глубоко нас любят. Я действительно хотел показать это и в книге.
Джули: Вы выросли в районе Логан-сквер в Чикаго. Можете ли вы рассказать нам, какие еще подробности о вашем районе вдохновили вас в книге?
Ева: Квартал(ы), в котором я вырос (мы много переезжали), послужил источником вдохновения для физической планировки квартала Майи. И ее дом был нашим домом. Рядом с нами был дом. Рядом был многоквартирный дом, а затем магазин на углу. Так что в моей голове Майя может пойти в магазин на углу, а ее мама может высунуться из окна и посмотреть, куда она идет. И поэтому часть этого заключается в том, как мы создаем возможности для детей, чтобы они имели надлежащий уровень независимости, признавая, что мир — опасное и страшное место? И кто те взрослые, которые следят за тем, чтобы она благополучно добралась до этого места, понимаете?
Джули: Одна из вещей, которые мне понравились в этой книге, это просто количество информации, которую нужно найти. Мол, в дополнение к глоссарию есть факт, после факта, после абзаца элементов для поиска. Типа, подождите минутку… Я не знаю, кто этот ученый!
Ева: Ты попалась в мою ловушку, Джули. Это потрясающе. Да, и я на это надеюсь. Вы знаете, я надеюсь, что учителям, классным руководителям и воспитателям в любой среде они назначат главу в книге, и тогда дети смогут узнать, кто был этот ученый. Когда я был учителем, я действительно ценил эти междисциплинарные возможности соединения, чтобы объединить различные предметные области, а также научить детей проводить независимые исследования. Так что это определенно очень намеренно, и я рад, что вы попали в мою подлую, подлую ловушку.
Джули: Еще мне понравилось, что ты дал место ребенку, который хочет расширить свою вселенную, работая над своим роботом вне школы. В своем собственном обучении вы обнаружили, что были дети, которые просто хотели вырваться за рамки, но эта школа была настолько ограничивающей, что вам нужно было предоставить им это пространство? С вашей стороны очень великодушно сообщить детям, что быть любопытным и даже одержимым — это нормально.
Ева: Да, у меня все время были эти дети. Когда я оглядываюсь назад на то время, когда я был учителем (очевидно, я люблю всех своих учеников одинаково), но некоторые из моментов, которые действительно особенные и которыми я дорожу больше всего, это когда ребенок пришел ко мне с интересом или чем-то что они хотели сделать и иметь место, чтобы поддержать их в этом. И да, вы знаете, вы должны сделать свою домашнюю работу. Вы должны сделать основы. Но я помню, у меня был студент, который очень интересовался инженерией и для каждого проекта хотел что-то построить. И он просто строил… без материалов… но с бумагой для принтера, которую он взял из моего класса… он мог построить масштабную модель самолета.
Я также помню студента, который написал рассказ о депрессии, и он назывался «Трудные времена Чикаго», потому что это очень хороший рассказ. Он хотел написать это, и он написал некоторые из них в классе, а затем спрашивал: «Можно я приду во время обеда? Могу я прийти после школы?» И он сидел там и просто написал эту книгу и проиллюстрировал ее, и я думаю об этих моментах. Я действительно так благодарен за то, что у меня была возможность дорожить этим.
Часть того, что я пытаюсь сделать сейчас как ученый, — это действительно исследовать с педагогами и политиками, как мы можем создать пространство в наших школах и за их пределами для детей, чтобы они могли это делать. Потому что все мы помним и оглядываемся назад на вещи, на которые мы потратили больше всего времени, на вещи, которыми мы были одержимы, над которыми мы очень много работали. Это могло быть или не быть школьным заданием, или это могла быть та странная навязчивая идея, когда вы делаете все возможное, что вас просят сделать.
Помню, когда я был в возрасте Майи, я был одержим древними цивилизациями. Раньше я любил читать о Египте и много знал об инках и майя. Но ни один взрослый никогда не приходил и не помогал мне что-то с этим делать. Точно так же я знал, что интересуюсь археологией, и купил столько книг, сколько смог. Но знаете, разве не было бы здорово получить какой-нибудь классный балл или что-то в этом роде? Или, по крайней мере, просто, как вы говорите, просто место, чтобы сказать, что все в порядке. И мои родители действительно были теми, кто сделал это.
Мой папа, например, водил нас в библиотеку Гарольда Вашингтона или в магазин подержанных книг, и именно он научил меня, например, если тебя интересует король Артур, давай купим 10 книг о короле Артуре, ты знать? Вас интересует Древний Египет? Давайте купим 10 книг о Тутанхамоне или о чем-то еще. И поэтому я очень благодарен за роль, которую мои родители сыграли в качестве педагогов в том, что они смогли обеспечить это.
Фотография Евы Л. Юинг от Mercedes Zapata
Учебное пособие по программированию робототехники: Программирование простого робота
Примечание редактора: 16 октября 2018 г. эта статья была переработана для работы с новейшими технологиями.
Посмотрим правде в глаза, роботы — это круто. Они тоже когда-нибудь будут править миром, и, надеюсь, к тому времени они пожалеют своих бедных мягкотелых создателей (они же разработчики робототехники) и помогут нам построить космическую утопию, наполненную изобилием. Я шучу, конечно, но только отчасти.
Стремясь хоть как-то повлиять на этот вопрос, в прошлом году я прошел курс теории управления автономными роботами, кульминацией которого стало создание симулятора робота на основе Python, который позволил мне практиковать теорию управления на простом, мобильном, программируемый робот.
В этой статье я собираюсь показать, как использовать среду роботов Python для разработки управляющего программного обеспечения, описать схему управления, которую я разработал для своего смоделированного робота, проиллюстрировать, как он взаимодействует с окружающей средой и достигает своих целей, а также обсудить некоторые фундаментальных проблем программирования робототехники, с которыми я столкнулся на этом пути.
Чтобы следовать этому руководству по программированию робототехники для начинающих, вы должны иметь базовые знания о двух вещах:
- Математика — мы будем использовать некоторые тригонометрические функции и векторы
- Python — поскольку Python является одним из наиболее популярных базовых языков программирования роботов — мы будем использовать основные библиотеки и функции Python
Фрагменты кода, показанные здесь, являются лишь частью всего симулятора, который опирается на классы и интерфейсы, поэтому для непосредственного чтения кода вам может понадобиться некоторый опыт работы с Python и объектно-ориентированным программированием.
Наконец, необязательные темы, которые помогут вам лучше следовать этому руководству, — это знание того, что такое конечный автомат и как работают датчики диапазона и энкодеры.
Проблема программируемого робота: восприятие против реальности и хрупкость управления
Основная проблема всей робототехники заключается в следующем: невозможно узнать истинное состояние окружающей среды. Программное обеспечение для управления роботом может только угадывать состояние реального мира на основе измерений, возвращаемых его датчиками. Он может только попытаться изменить состояние реального мира посредством генерации управляющих сигналов.
Программное обеспечение для управления роботом может только угадывать состояние реального мира на основе измерений, возвращаемых его датчиками.
Таким образом, одним из первых шагов в разработке системы управления является создание абстракции реального мира, известной как модель , с помощью которой можно интерпретировать показания датчиков и принимать решения. Пока реальный мир ведет себя в соответствии с предположениями модели, мы можем делать правильные предположения и осуществлять контроль. Однако как только реальный мир отклонится от этих предположений, мы больше не сможем делать правильные предположения, и контроль будет потерян. Часто, потеряв контроль, восстановить его уже невозможно. (Если только какая-то доброжелательная внешняя сила не восстановит его.)
Это одна из основных причин сложности программирования робототехники. Мы часто видим видеоролики о новейшем исследовательском роботе в лаборатории, демонстрирующем фантастические подвиги ловкости, навигации или командной работы, и у нас возникает соблазн спросить: «Почему это не используется в реальном мире?» Что ж, в следующий раз, когда вы увидите такое видео, обратите внимание на то, насколько строго контролируется лабораторная среда. В большинстве случаев эти роботы способны выполнять эти впечатляющие задачи только до тех пор, пока условия окружающей среды остаются в узких рамках их внутренней модели. Таким образом, одним из ключей к развитию робототехники является разработка более сложных, гибких и надежных моделей, и указанное продвижение зависит от ограничений доступных вычислительных ресурсов.
Одним из ключей к развитию робототехники является разработка более сложных, гибких и надежных моделей.
[Примечание: как философы, так и психологи отмечают, что живые существа также страдают от зависимости от собственного внутреннего восприятия того, что им говорят их чувства. Многие достижения в робототехнике связаны с наблюдением за живыми существами и наблюдением за тем, как они реагируют на неожиданные стимулы. Подумай об этом. Какова ваша внутренняя модель мира? Он отличается от муравья и рыбы? (Надеюсь.) Однако, подобно муравью и рыбе, он, вероятно, чрезмерно упрощает некоторые реалии мира. Когда ваши представления о мире неверны, вы рискуете потерять контроль над вещами. Иногда мы называем это «опасностью». Точно так же, как наш маленький робот борется за выживание в неизвестной вселенной, мы все тоже. Это мощное озарение для робототехников.]
Симулятор программируемого робота
Симулятор, который я построил, написан на Python и очень умно назван Симулятор Собота . Вы можете найти v1.0.0 на GitHub. В нем не так много наворотов, но он создан для того, чтобы делать одну вещь очень хорошо: обеспечить точную симуляцию мобильного робота и дать начинающему робототехнику простую основу для практики программирования программного обеспечения для роботов. Хотя всегда лучше иметь настоящего робота для игры, хороший симулятор робота Python гораздо более доступен и является отличным местом для начала.
В реальных роботах программное обеспечение, генерирующее управляющие сигналы («контроллер»), должно работать на очень высокой скорости и выполнять сложные вычисления. Это влияет на выбор того, какие языки программирования роботов лучше всего использовать: обычно для таких сценариев используется C++, но в более простых робототехнических приложениях Python является очень хорошим компромиссом между скоростью выполнения и простотой разработки и тестирования.
Программное обеспечение, которое я написал, имитирует реального исследовательского робота по имени Хепера, но его можно адаптировать к целому ряду мобильных роботов с различными размерами и датчиками. Так как я пытался запрограммировать симулятор как можно ближе к возможностям реального робота, то логика управления может быть загружена в реального робота Хепера с минимальным рефакторингом, и он будет выполнять те же функции, что и смоделированный робот. Реализованные специфические функции относятся к Khepera III, но их можно легко адаптировать к новой Khepera IV.
Другими словами, программирование смоделированного робота аналогично программированию реального робота. Это очень важно, если симулятор будет использоваться для разработки и оценки различных подходов к управляющему программному обеспечению.
В этом руководстве я буду описывать архитектуру программного обеспечения для управления роботом, которое поставляется с версией 1.0.0 Sobot Rimulator , и предоставлять фрагменты из исходного кода Python (с небольшими изменениями для ясности). Тем не менее, я призываю вас погрузиться в источник и возиться. Симулятор был разветвлен и использовался для управления различными мобильными роботами, в том числе Roomba2 от iRobot. Точно так же, пожалуйста, не стесняйтесь разветвлять проект и улучшать его.
Логика управления роботом ограничена следующими классами/файлами Python:
-
models/supervisor.py— этот класс отвечает за взаимодействие между симулируемым миром вокруг робота и самим роботом. Он развивает конечный автомат нашего робота и запускает контроллеры для вычисления желаемого поведения. -
models/supervisor_state_machine.py— этот класс представляет различные состояния , в которых может находиться робот, в зависимости от его интерпретации датчиков. - Файлы в каталоге
models/controllers— эти классы реализуют различное поведение робота при известном состоянии среды. В частности, конкретный контроллер выбирается в зависимости от конечного автомата.
Цель
Роботам, как и людям, нужна цель в жизни. Задача нашего программного обеспечения, управляющего этим роботом, будет очень простой: он попытается добраться до заданной целевой точки. Обычно это основная функция, которой должен обладать любой мобильный робот, от автономных автомобилей до роботов-пылесосов. Координаты цели запрограммированы в управляющем программном обеспечении до того, как робот будет активирован, но могут быть сгенерированы из дополнительного приложения Python, которое наблюдает за движениями робота. Например, представьте, что вы проезжаете через несколько путевых точек.
Однако, чтобы усложнить ситуацию, окружение робота может быть усеяно препятствиями. Робот НЕ МОЖЕТ столкнуться с препятствием на пути к цели. Поэтому, если робот сталкивается с препятствием, ему придется найти обходной путь, чтобы продолжить путь к цели.
Программируемый робот
Каждый робот имеет разные возможности и задачи управления. Давайте познакомимся с нашим моделируемым программируемым роботом.
Первое, что следует отметить, это то, что в этом руководстве наш робот будет иметь номер 9.0709 автономный мобильный робот . Это означает, что он будет свободно перемещаться в пространстве и делать это под своим контролем. Это отличается, скажем, от робота с дистанционным управлением (который не является автономным) или заводского робота-манипулятора (который не является мобильным). Наш робот должен сам выяснить, как достичь своих целей и выжить в своей среде. Это оказывается удивительно сложной задачей для начинающих программистов робототехники.
Входы управления: датчики
Робот может быть оборудован различными способами для наблюдения за окружающей средой. Это могут быть датчики приближения, датчики освещенности, бамперы, камеры и так далее. Кроме того, роботы могут связываться с внешними датчиками, которые дают им информацию, которую они сами не могут наблюдать напрямую.
Наш эталонный робот оснащен девятью инфракрасными датчиками — более новая модель имеет восемь инфракрасных и пять ультразвуковых датчиков приближения — расположенных «юбкой» во всех направлениях. Датчиков, обращенных к передней части робота, больше, чем к задней, потому что роботу обычно важнее знать, что находится перед ним, чем то, что находится позади него.
В дополнение к датчикам приближения робот имеет пару колесиков , которые отслеживают движение колес. Они позволяют отслеживать, сколько оборотов делает каждое колесо, при этом один полный оборот колеса вперед составляет 2765 тактов. Повороты в противоположном направлении отсчитываются назад, уменьшая количество тактов, а не увеличивая его. Вам не нужно беспокоиться о конкретных числах в этом руководстве, потому что программное обеспечение, которое мы напишем, использует пройденное расстояние, выраженное в метрах. Позже я покажу вам, как вычислить его из тиков с помощью простой функции Python.
Управляющие выходы: Мобильность
Некоторые роботы передвигаются на ногах. Некоторые катятся как мяч. Некоторые даже скользят, как змеи.
Наш робот оснащен дифференциальным приводом, то есть передвигается на двух колесах. Когда оба колеса вращаются с одинаковой скоростью, робот движется прямолинейно. Когда колеса движутся с разной скоростью, робот поворачивается. Таким образом, управление движением этого робота сводится к правильному управлению скоростью вращения каждого из этих двух колес.
API
В Sobot Rimulator разделение между «компьютером» робота и (симулируемым) физическим миром воплощено в файле robot_supervisor_interface.py , который определяет весь API для взаимодействия с датчиками «реального робота» и двигатели:
-
read_proximity_sensors()возвращает массив из девяти значений в собственном формате датчиков -
read_wheel_encoders()возвращает массив из двух значений, указывающих общее количество тактов с начала -
set_wheel_drive_rates( v_l, v_r )принимает два значения (в радианах в секунду) и устанавливает скорость левого и правого колес на эти два значения
Этот интерфейс внутренне использует объект робота, который предоставляет данные от датчиков и возможность перемещать моторы или колеса. Если вы хотите создать другого робота, вам просто нужно предоставить другой класс робота Python, который можно использовать с тем же интерфейсом, а остальная часть кода (контроллеры, супервизор и симулятор) будет работать из коробки!
Симулятор
Так же, как вы использовали бы настоящего робота в реальном мире, не уделяя слишком много внимания законам физики, вы можете игнорировать то, как робот моделируется, и сразу перейти к тому, как запрограммировано программное обеспечение контроллера, поскольку это будет почти то же самое между реальным миром и симуляцией. Но если вам интересно, я кратко представлю это здесь.
Файл world.py — это класс Python, представляющий смоделированный мир с роботами и препятствиями внутри. Пошаговая функция внутри этого класса заботится об эволюции нашего простого мира:
- Применение правил физики к движениям робота
- Учет столкновений с препятствиями
- Предоставление новых значений для датчиков робота
В конце он вызывает супервайзеров роботов, ответственных за выполнение программного обеспечения мозга робота.
Пошаговая функция выполняется в цикле, так что robot.step_motion() перемещает робота, используя скорость колеса, вычисленную супервизором на предыдущем шаге моделирования.
# пошаговое моделирование через один временной интервал шаг определения (сам): дт = само.дт # перешагнуть всех роботов для робота в self.robots: # пошаговое движение робота robot.step_motion ( дт ) # применить физические взаимодействия self.physics.apply_physics() # ПРИМЕЧАНИЕ. Наблюдатели должны бежать последними, чтобы убедиться, что они наблюдают за «текущим» миром. # пошагово всех супервайзеров для руководителя в self.supervisors: супервизор.шаг( дт ) # увеличить мировое время self.world_time += дт
Функция apply_physics() внутренне обновляет значения датчиков приближения робота, чтобы супервизор мог оценить окружающую среду на текущем этапе моделирования. Те же принципы применимы и к энкодерам.
Простая модель
Во-первых, у нашего робота будет очень простая модель. Он будет делать много предположений о мире. Некоторые из важных включают:
- Местность всегда плоская и даже
- Препятствия никогда не бывают круглыми
- Колеса никогда не скользят
- Ничто и никогда не сможет толкнуть робота вокруг
- Датчики никогда не выходят из строя и не дают ложных показаний
- Колеса всегда крутятся, когда им говорят
Хотя большинство из этих предположений разумны в среде, похожей на дом, могут присутствовать круглые препятствия. Наше программное обеспечение для предотвращения препятствий имеет простую реализацию и следует за границей препятствий, чтобы объехать их. Мы подскажем читателям, как улучшить систему управления нашего робота с дополнительной проверкой, чтобы избежать круговых препятствий.
Контур управления
Теперь мы перейдем к ядру нашего управляющего программного обеспечения и объясним поведение, которое мы хотим запрограммировать внутри робота. В этот фреймворк можно добавить дополнительные варианты поведения, и вы должны попробовать свои собственные идеи после того, как закончите читать! Программное обеспечение для робототехники, основанное на поведении, было предложено более 20 лет назад, и оно до сих пор является мощным инструментом для мобильной робототехники. Например, в 2007 году набор моделей поведения использовался в DARPA Urban Challenge — первом соревновании для автомобилей с автономным управлением!
Робот — это динамическая система. Состояние робота, показания его датчиков и воздействие его управляющих сигналов постоянно меняются. Управление ходом событий включает следующие три шага:
- Применение управляющих сигналов.
- Измерьте результаты.
- Генерировать новые управляющие сигналы, рассчитанные на то, чтобы приблизить нас к нашей цели.
Эти шаги повторяются снова и снова, пока мы не достигнем нашей цели. Чем больше раз мы можем делать это в секунду, тем лучше мы будем контролировать систему. Робот Sobot Rimulator повторяет эти шаги 20 раз в секунду (20 Гц), но многие роботы должны делать это тысячи или миллионы раз в секунду, чтобы иметь адекватный контроль. Помните наше предыдущее введение о разных языках программирования роботов для разных систем робототехники и требованиях к скорости.
В общем, каждый раз, когда наш робот производит измерения с помощью своих датчиков, он использует эти измерения для обновления своей внутренней оценки состояния мира — например, расстояния до цели. Он сравнивает это состояние с эталонным значением того, каким он хочет состояния (для расстояния он хочет, чтобы оно было равно нулю), и вычисляет ошибку между желаемым состоянием и фактическим состоянием. Как только эта информация известна, генерация новых управляющих сигналов может быть сведена к задаче , минимизируя ошибку , которая в конечном итоге приведет робота к цели.
Изящный трюк: упрощение модели
Чтобы управлять роботом, который мы хотим запрограммировать, мы должны послать сигнал на левое колесо, сообщая ему, как быстро поворачивать, и отдельный сигнал на правое колесо, сообщая ему как быстро поворачивать. Назовем эти сигналы v L и v R . Однако, постоянно думая в терминах против L и v R очень громоздки. Вместо того, чтобы спрашивать: «Как быстро мы хотим, чтобы левое колесо вращалось, и как быстро мы хотим, чтобы вращалось правое колесо?» более естественно спросить: «Как быстро мы хотим, чтобы робот двигался вперед, и как быстро мы хотим, чтобы он поворачивал или менял направление?» Назовем эти параметры скоростью v и угловой (вращательной) скоростью ω (читай «омега»). Оказывается, мы можем построить всю нашу модель на и и ω вместо v L и v R , и только после того, как мы определили, как должен двигаться наш запрограммированный робот, математически преобразовать эти два значения в v L v и 4 R нам нужно собственно управлять колесами робота. Это известно как одноколесный велосипед модели управления.
Вот код Python, который реализует окончательное преобразование в supervisor. . Обратите внимание, что если ω равно 0, оба колеса будут вращаться с одинаковой скоростью: py
# генерировать и отправлять роботу правильные команды def _send_robot_commands(я): # ... v_l, v_r = self._uni_to_diff(v, омега) self.robot.set_wheel_drive_rates(v_l, v_r) def _uni_to_diff(я, v, омега): # v = поступательная скорость (м/с) # омега = угловая скорость (рад/с) R = self.robot_wheel_radius L = self.robot_wheel_base_length v_l = ((2,0 * v) - (омега*L)) / (2,0 * R) v_r = ((2,0 * v) + (омега*L)) / (2,0 * R) вернуть v_l, v_r
Используя свои датчики, робот должен попытаться оценить состояние окружающей среды, а также свое собственное состояние. Эти оценки никогда не будут идеальными, но они должны быть достаточно хорошими, поскольку робот будет основывать все свои решения на этих оценках. Используя только свои датчики приближения и бегущую строку, он должен попытаться угадать следующее:
- Направление на препятствия
- Расстояние до препятствий
- Позиция робота
- Рубрика робот
Первые два свойства определяются показаниями датчика приближения и довольно просты. Функция API read_proximity_sensors() возвращает массив из девяти значений, по одному для каждого датчика. Мы заранее знаем, что седьмое показание, например, соответствует датчику, который указывает на 75 градусов вправо от робота.
Таким образом, если это значение показывает значение, соответствующее расстоянию 0,1 метра, мы знаем, что на расстоянии 0,1 метра находится препятствие, 75 градусов левее. Если препятствия нет, датчик вернет показания максимальной дальности 0,2 метра. Таким образом, если мы покажем 0,2 метра на седьмом датчике, мы будем считать, что препятствия в этом направлении на самом деле нет.
Из-за того, как работают инфракрасные датчики (измеряют инфракрасное отражение), возвращаемые ими числа являются нелинейным преобразованием фактического обнаруженного расстояния. Таким образом, функция Python для определения указанного расстояния должна преобразовать эти показания в метры. Это делается в supervisor.py следующим образом:
# обновить расстояния, указанные датчиками приближения
def _update_proximity_sensor_distances(self):
self. proximity_sensor_distances = [0,02-( log(readval/3960,0) )/30,0 для
readval в self.robot.read_proximity_sensors() ]
Опять же, у нас есть конкретная модель датчика в этой платформе робота Python, в то время как в реальном мире датчики поставляются с сопутствующим программным обеспечением, которое должно обеспечивать аналогичные функции преобразования нелинейных значений в метры.
Определение положения и направления робота (вместе известное как поза в программировании робототехники) является несколько более сложной задачей. Наш робот использует одометрию для оценки своей позы. Здесь на помощь приходят тикеры колес. Измеряя, насколько повернулось каждое колесо с момента последней итерации цикла управления, можно получить точную оценку того, как изменилась поза робота, но только если сдача небольшая .
Это одна из причин, по которой важно очень часто повторять цикл управления в реальном роботе, где двигатели, приводящие в движение колеса, могут быть несовершенными. Если бы мы слишком долго ждали, чтобы измерить ход колес, оба колеса могли бы сделать довольно много, и будет невозможно оценить, где мы оказались.
Учитывая наш текущий программный симулятор, мы можем позволить себе выполнять вычисления одометрии с частотой 20 Гц — на той же частоте, что и контроллеры. Но было бы неплохо иметь отдельный поток Python, работающий быстрее, чтобы улавливать небольшие движения бегущих строк.
Ниже приведена полная функция одометрии в supervisor.py , которая обновляет оценку позы робота. Обратите внимание, что поза робота состоит из координат x и y , а также направления тета , которое измеряется в радианах от положительной оси X. Положительное x находится на востоке, а положительное y — на севере. Таким образом, заголовок 0 указывает, что робот смотрит прямо на восток. Робот всегда принимает исходную позу 9.1042 (0, 0), 0 .
# обновить предполагаемое положение робота, используя показания его колесного энкодера def _update_odometry(сам): R = self.
Теперь, когда наш робот может правильно оценить реальный мир, давайте воспользуемся этой информацией для достижения наших целей.
Связанный: Учебник по физике видеоигр — обнаружение столкновений с твердыми объектами
Методы программирования роботов Python: поведение на пути к цели . Так как же нам заставить колеса повернуться, чтобы добраться туда? Давайте начнем с того, что немного упростим наше мировоззрение и предположим, что на пути нет препятствий.
Это становится простой задачей и может быть легко запрограммировано на Python. Если мы будем идти вперед, глядя на цель, мы ее достигнем. Благодаря нашей одометрии мы знаем, каковы наши текущие координаты и направление. Мы также знаем, каковы координаты цели, потому что они были запрограммированы заранее. Поэтому, используя немного линейной алгебры, мы можем определить вектор от нашего местоположения к цели, как в go_to_goal_controller.py :
# вернуть вектор движения к цели в системе отсчета робота def calculate_gtg_heading_vector (я): # получить инверсию позы робота robot_inv_pos, robot_inv_theta = self.
Обратите внимание, что мы получаем вектор к цели в системе отсчета робота , а НЕ в мировых координатах. Если цель находится на оси X в системе отсчета робота, это означает, что она находится прямо перед роботом. Таким образом, угол этого вектора от оси X представляет собой разницу между нашим курсом и курсом, по которому мы хотим двигаться. Другими словами, это ошибка между нашим текущим состоянием и тем, каким мы хотим видеть наше текущее состояние. Поэтому мы хотим скорректировать скорость поворота ω так, чтобы угол между нашим курсом и целью изменился в сторону 0. Мы хотим минимизировать ошибку:
# вычислить погрешность theta_d = atan2( self.gtg_heading_vector[1], self.gtg_heading_vector[0] ) # рассчитать угловую скорость омега = self.
self.kP в приведенном выше фрагменте реализации контроллера Python — усиление управления. Это коэффициент, который определяет, как быстро мы превращаемся в пропорционально тому, насколько далеко мы стоим перед целью. Если ошибка в нашем заголовке 0 , то скорость поворота тоже 0 . В реальной функции Python внутри файла go_to_goal_controller.py вы увидите больше подобных усилений, так как мы использовали ПИД-регулятор вместо простого пропорционального коэффициента.
Теперь, когда у нас есть угловая скорость ω , как нам определить скорость движения вперед v ? Хорошее общее эмпирическое правило, которое вы, вероятно, знаете инстинктивно: если мы не делаем поворот, мы можем двигаться вперед на полной скорости, а затем, чем быстрее мы поворачиваем, тем больше мы должны замедляться. Обычно это помогает нам поддерживать стабильность нашей системы и действовать в рамках нашей модели. Таким образом, v является функцией ω . В go_to_goal_controller.py уравнение выглядит следующим образом:
# расчет поступательной скорости # скорость равна v_max, когда омега равна 0, # быстро падает до нуля, поскольку |omega| поднимается v = self.supervisor.v_max() / (abs(омега) + 1)**0,5
Предложение уточнить эту формулу состоит в том, чтобы учесть, что мы обычно замедляемся, когда приближаемся к цели, чтобы достичь ее с нулевой скоростью. Как изменится эта формула? Он должен как-то включать замену v_max() с чем-то пропорциональным расстоянию.
Итак, мы почти завершили один контур управления. Осталось только преобразовать эти два параметра модели одноколесного велосипеда в дифференциальные скорости колес и послать сигналы на колеса. Вот пример траектории движения робота под контроллером «идти к цели», без препятствий:
Как мы видим, вектор к цели является для нас эффективным ориентиром, на котором мы основываем наши расчеты управления. Это внутреннее представление о том, «куда мы хотим прийти». Как мы увидим, единственное существенное различие между движением к цели и другими видами поведения заключается в том, что иногда идти к цели — плохая идея, поэтому мы должны вычислить другой опорный вектор.
Методы программирования роботов Python: поведение избегания препятствий
Показательным примером является движение к цели, когда в этом направлении есть препятствие. Вместо того, чтобы бросаться сломя голову на препятствия на нашем пути, давайте попробуем запрограммировать закон управления, который заставит робота избегать их.
Чтобы упростить сценарий, давайте теперь полностью забудем о цели и просто сделаем нашей целью следующее: Когда перед нами не будет препятствий, двигайтесь вперед. При встрече с препятствием отворачиваемся от него до тех пор, пока оно не перестанет быть перед нами.
Соответственно, когда перед нами нет препятствия, мы хотим, чтобы наш опорный вектор просто указывал вперед. Тогда ω будет нулем, а v будет максимальной скоростью. Однако, как только мы обнаруживаем препятствие с помощью наших датчиков приближения, мы хотим, чтобы опорный вектор указывал в любом направлении от препятствия. Это заставит ω взлететь вверх, чтобы отвернуть нас от препятствия, и заставит v упасть, чтобы мы случайно не столкнулись с препятствием в процессе.
Аккуратный способ сгенерировать желаемый опорный вектор состоит в том, чтобы преобразовать наши девять показаний близости в векторы и взять взвешенную сумму. Когда препятствия не обнаружены, векторы суммируются симметрично, в результате чего опорный вектор указывает прямо вперед, как это необходимо. Но если датчик, скажем, с правой стороны улавливает препятствие, он внесет в сумму меньший вектор, и результатом будет опорный вектор, сдвинутый влево.
Для обычного робота с другим расположением датчиков может быть применена та же идея, но может потребоваться изменение веса и/или дополнительная осторожность, когда датчики симметричны спереди и сзади робота, поскольку взвешенная сумма может стать нулем.
Вот код, который делает это в Avoid_obstacles_controller.py :
# усиления датчика (веса)
self.sensor_gains = [ 1.0+( (0.4*abs(p.theta)) / pi )
для p в supervisor.proximity_sensor_placements() ]
# ...
# вернуть вектор обхода препятствий в системе отсчета робота
# также возвращает векторы обнаруженных препятствий в системе отсчета робота
def calculate_ao_heading_vector (я):
# инициализируем вектор
препятствия_векторы = [[0.0, 0.0]] * len(self.proximity_sensor_placements)
ao_heading_vector = [0.0, 0.0]
# получить расстояния, указанные показаниями датчиков робота
sensor_distances = self.supervisor.proximity_sensor_distances()
# рассчитать положение обнаруженных препятствий и найти вектор уклонения
robot_pos, robot_theta = self.supervisor.estimated_pose().vector_unpack()
для i в диапазоне (len (sensor_distances)):
# рассчитать положение препятствия
Sensor_pos, sensor_theta = self.proximity_sensor_placements[i]. vector_unpack()
вектор = [датчик_расстояний[i], 0.0]
вектор = linalg.rotate_and_translate_vector( вектор, sensor_theta, sensor_pos )
препятствия_векторы[i] = вектор # сохранить векторы препятствий в системе отсчета робота
# накапливаем вектор курса в системе отсчета робота
ao_heading_vector = linalg.add( ao_heading_vector,
linalg.scale(вектор, self.sensor_gains[i]))
вернуть ao_heading_vector, препятствия_векторы
Используя полученный ao_heading_vector в качестве эталона для робота, чтобы попытаться сопоставить, вот результаты запуска программного обеспечения робота в моделировании с использованием только контроллера обхода препятствий, полностью игнорируя целевую точку. Робот бесцельно прыгает, но никогда не сталкивается с препятствием и даже может перемещаться в очень ограниченном пространстве:
До сих пор мы описывали два поведения — движение к цели и избегание препятствий — по отдельности. Оба прекрасно выполняют свою функцию, но для успешного достижения цели в среде, полной препятствий, нам нужно их объединить.
Решение, которое мы разработаем, заключается в классе машин, которые имеют в высшей степени круто звучащее название гибридных автоматов . Гибридный автомат запрограммирован с несколькими различными режимами поведения или режимами, а также с контролирующим конечным автоматом. Конечный автомат надзора переключается из одного режима в другой в дискретное время (когда цели достигнуты или окружающая среда внезапно слишком сильно изменилась), в то время как каждое поведение использует датчики и колеса для непрерывного реагирования на изменения окружающей среды. Решение было названо гибрид , потому что он развивается дискретно и непрерывно.
Наша платформа роботов Python реализует конечный автомат в файле supervisor_state_machine.py .
Оснащенные двумя нашими удобными действиями, простая логика напрашивается сама собой: Когда препятствия не обнаружены, используйте поведение «Идти к цели». При обнаружении препятствия переключайтесь на режим обхода препятствий до тех пор, пока препятствие не перестанет обнаруживаться.
Однако, как оказалось, эта логика создаст много проблем. Когда эта система сталкивается с препятствием, она будет склонна отворачиваться от него, а затем, как только оно отойдет от него, разворачиваться и снова натыкаться на него. В результате получается бесконечный цикл быстрых переключений, который делает робота бесполезным. В худшем случае робот может переключаться между действиями за 9 секунд.0793 на каждой итерации контура управления — состояние, известное как условие Зенона .
У этой проблемы есть несколько решений, и читатели, которым нужны более глубокие знания, должны проверить, например, архитектуру программного обеспечения DAMN.
Для нашего простого смоделированного робота нам нужно более простое решение: еще одно поведение, специализирующееся на задаче обойти препятствие и добраться до другой стороны.
Методы программирования роботов Python: поведение Follow-Wall
Вот идея: когда мы сталкиваемся с препятствием, возьмите показания двух ближайших к препятствию датчиков и используйте их для оценки поверхности препятствия. Затем просто установите наш опорный вектор так, чтобы он был параллелен этой поверхности. Продолжайте следовать за этой стеной до тех пор, пока А) между нами и целью не исчезнет препятствие, и Б) мы не приблизимся к цели, чем были в начале пути. Тогда мы можем быть уверены, что правильно преодолели препятствие.
С нашей ограниченной информацией мы не можем точно сказать, будет ли быстрее объезжать препятствие слева или справа. Чтобы принять решение, мы выбираем направление, которое сразу приблизит нас к цели. Чтобы выяснить, какой это путь, нам нужно знать опорные векторы поведения «идти к цели» и поведения «избегания препятствия», а также оба возможных опорных вектора следования за стеной. Вот иллюстрация того, как принимается окончательное решение (в этом случае робот пойдет налево):
Определение опорных векторов следования за стеной оказывается немного более сложным, чем опорные векторы уклонения от препятствия или движения к цели. Взгляните на код Python в follow_wall_controller.py , чтобы увидеть, как это делается.
Окончательный дизайн управления использует поведение следования за стеной практически для всех столкновений с препятствиями. Однако, если робот окажется в узком месте, в опасной близости от столкновения, он переключится в режим чистого избегания препятствий до тех пор, пока не окажется на более безопасном расстоянии, а затем вернется в режим следования за стеной. После успешного преодоления препятствий робот переключается на движение к цели. Вот диаграмма конечного состояния, которая запрограммирована внутри supervisor_state_machine.py :
Вот робот, успешно перемещающийся в многолюдной среде, используя эту схему управления:
Дополнительная функция конечного автомата, которую вы можете попробовать реализовать, — это способ избежать круговых препятствий путем переключения двигаться к цели как можно скорее, вместо того, чтобы следовать за границей препятствия до конца (чего не существует для круглых объектов!)0002 Схема управления, которая поставляется с Sobot Riulator, очень точно настроена. Потребовалось много часов настройки одной небольшой переменной здесь и другого уравнения там, чтобы заставить ее работать так, как я был доволен. Программирование робототехники часто включает в себя множество старых простых проб и ошибок. Роботы очень сложны, и есть несколько простых способов заставить их вести себя оптимально в среде симулятора роботов… по крайней мере, не намного меньше прямого машинного обучения, но это совсем другая проблема.
Робототехника часто требует большого количества старых проб и ошибок.
Я призываю вас поиграть с управляющими переменными в Sobot Rimulator, наблюдать и пытаться интерпретировать результаты. Все следующие изменения оказывают сильное влияние на поведение моделируемого робота:
- Прирост ошибки
кПав каждом контроллере - Усиление датчика, используемое контроллером предотвращения препятствий
- Вычисление v как функции ω в каждом контроллере
- Расстояние до препятствия, используемое контроллером слежения за стеной
- Условия переключения, используемые
supervisor_state_machine. py - Почти все остальное
Когда программируемые роботы терпят неудачу
Мы проделали большую работу, чтобы добраться до этого момента, и этот робот кажется довольно умным. Тем не менее, если вы запустите Sobot Rimulator через несколько рандомизированных карт, не пройдет много времени, прежде чем вы найдете ту, с которой этот робот не может справиться. Иногда он заезжает прямо в крутые повороты и сталкивается. Иногда он просто бесконечно колеблется взад и вперед на неправильной стороне препятствия. Иногда оно законно заключено в тюрьму без возможного пути к цели. После всех наших тестов и настроек иногда мы должны прийти к выводу, что модель, с которой мы работаем, просто не подходит для работы, и нам нужно изменить дизайн или добавить функциональность.
Во вселенной мобильных роботов «мозг» нашего маленького робота находится на более простом конце спектра. Многие случаи сбоев, с которыми он сталкивается, можно преодолеть, добавив в смесь более продвинутое программное обеспечение. Более продвинутые роботы используют такие методы, как , отображающие , чтобы помнить, где они были, и избегать повторения одних и тех же действий снова и снова; эвристика , чтобы генерировать приемлемые решения, когда невозможно найти идеальное решение; и машинное обучение , чтобы более точно настроить различные параметры управления, управляющие поведением робота.
Образец будущего
Роботы уже так много делают для нас, и в будущем они сделают еще больше. Хотя даже базовое программирование робототехники — сложная область изучения, требующая большого терпения, она также увлекательна и чрезвычайно полезна.
В этом руководстве мы узнали, как разработать программное обеспечение для реактивного управления роботом с использованием языка программирования высокого уровня Python. Но есть много более продвинутых концепций, которые можно быстро изучить и протестировать с помощью каркаса роботов Python, аналогичного прототипу, который мы создали здесь. Я надеюсь, что вы рассмотрите возможность участия в формировании будущих вещей!
Благодарность: Я хотел бы поблагодарить доктора Магнуса Эгерштедта и Жана-Пьера де ла Круа из Технологического института Джорджии за то, что они научили меня всему этому, и за их энтузиазм в отношении моей работы над симулятором Собота.
Связанный: Учебное пособие по OpenCV: обнаружение объектов в реальном времени с использованием MSER в iOS
Робототехника: что такое роботы? Определение и использование робототехники.
Как работают роботы?
Независимые роботы
Независимые роботы способны функционировать полностью автономно и независимо от контроля оператора. Обычно они требуют более интенсивного программирования, но позволяют роботам заменять людей при выполнении опасных, обыденных или невыполнимых по иным причинам задач, от сброса бомб и глубоководных путешествий до автоматизации производства. Независимые роботы оказались наиболее разрушительными для общества, поскольку они сокращают определенные рабочие места, но также предоставляют новые возможности для роста.
Зависимые роботы
Зависимые роботы — это неавтономные роботы, которые взаимодействуют с людьми для улучшения и дополнения уже существующих действий. Это относительно новая форма технологии, и она постоянно расширяется для новых приложений, но одна из реализованных форм зависимых роботов — это усовершенствованные протезы, которые контролируются человеческим разумом.
Известный пример зависимого робота был создан Johns Hopkins APL в 2018 году для Джонни Матени, пациента, которому ампутировали руку выше локтя. Матени был оснащен модульным протезом конечности, чтобы исследователи могли изучать его использование в течение длительного периода времени. MPL контролируется с помощью электромиографии или сигналов, посылаемых его ампутированной конечностью, которая управляет протезом. Со временем Матени стал более эффективно управлять MPL, а сигналы, посылаемые его ампутированной конечностью, стали меньше и менее изменчивы, что привело к большей точности его движений и позволило Матени выполнять такие деликатные задачи, как игра на пианино.
Лучшие компании в области робототехники с открытыми ролямиПросмотр лучших компаний в области робототехники, нанимающих сейчас
Каковы основные компоненты робота?
Роботы созданы для решения различных задач и выполнения различных задач, поэтому для выполнения этих задач требуются различные специализированные компоненты.
Каковы основные компоненты робота?
- Система управления: центральный процессор, который управляет задачей робота на высоком уровне.
- Датчики: компонент, передающий электрические сигналы, позволяющие роботу взаимодействовать с окружающим миром.
- Приводы: части двигателя, отвечающие за движение робота.
- Блок питания: батарея, которая питает робота.
- Конечные эффекторы: внешние особенности робота, позволяющие ему выполнять задачу.
Однако в конструкции каждого робота есть несколько компонентов, таких как источник питания или центральный процессор. Вообще говоря, компоненты робототехники делятся на следующие пять категорий:
Система управления
Вычисления включают в себя все компоненты, составляющие центральный процессор робота, который часто называют его системой управления. Системы управления запрограммированы так, чтобы сообщать роботу, как использовать его определенные компоненты, в некотором роде подобно тому, как человеческий мозг посылает сигналы по всему телу для выполнения конкретной задачи. Эти роботизированные задачи могут включать что угодно, от минимально инвазивной хирургии до упаковки на конвейере.
Датчики
Датчики обеспечивают робота стимулами в виде электрических сигналов, которые обрабатываются контроллером и позволяют роботу взаимодействовать с внешним миром. Общие датчики, используемые в роботах, включают видеокамеры, функционирующие как глаза, фоторезисторы, реагирующие на свет, и микрофоны, работающие как уши. Эти датчики позволяют роботу фиксировать свое окружение и делать наиболее логичный вывод на основе текущего момента, а также позволяют контроллеру передавать команды дополнительным компонентам.
Видео: Лаборатория прикладной физики JHU
Приводы
Устройство можно считать роботом, только если оно имеет подвижную раму или корпус. Приводы – это компоненты, отвечающие за это движение. Эти компоненты состоят из двигателей, которые получают сигналы от системы управления и движутся в тандеме для выполнения движения, необходимого для выполнения поставленной задачи. Приводы могут быть изготовлены из различных материалов, таких как металл или эластичный материал, и обычно работают с использованием сжатого воздуха (пневматические приводы) или масла (гидравлические приводы), но бывают разных форматов, чтобы наилучшим образом выполнять свои специальные функции.
Блок питания
Как человеческому телу для работы требуется пища, так и роботам нужна энергия. Стационарные роботы, например, установленные на фабрике, могут работать от сети переменного тока через настенную розетку, но чаще всего роботы работают от внутренней батареи. В большинстве роботов используются свинцово-кислотные батареи из-за их безопасных свойств и длительного срока хранения, в то время как в других могут использоваться более компактные, но и более дорогие серебряно-кадмиевые батареи. Безопасность, вес, заменяемость и жизненный цикл — все это важные факторы, которые необходимо учитывать при разработке блока питания робота.
Некоторые потенциальные источники энергии для будущего развития роботов также включают пневматическую энергию от сжатых газов, солнечную энергию, гидравлическую энергию, энергию маховика для хранения органических отходов посредством анаэробного сбраживания и ядерную энергию.
Концевые эффекторы
Концевые эффекторы — это физические, обычно внешние компоненты, которые позволяют роботам завершать выполнение своих задач. Роботы на фабриках часто имеют сменные инструменты, такие как распылители краски и сверла, хирургические роботы могут быть оснащены скальпелями, а другие виды роботов могут быть созданы с захватными когтями или даже руками для таких задач, как доставка, упаковка, распыление бомб и многое другое.
Как заставить робота делать то, что вы хотите
Наконец-то он у вас есть. Самый удивительный робот со всеми датчиками и исполнительными механизмами, о которых вы когда-либо мечтали. LIDAR, RADAR, зрение, массив микрофонов в дальней зоне, чувствительное к давлению касание, точный GPS и одометрия. Динамики, экраны, ноги, руки, руки и, может быть, даже огнемет. У этого робота есть все. Может быть, это то, что вы собрали в своем гараже в свободное время. Независимо от того, сколько лет работы, исследований и переделок ушло на создание робота вашей мечты, который, как вы уверены, может чувствовать и делать что угодно.
Итак, теперь начинается настоящая работа — вам нужно каким-то образом заставить этого робота делать то, что вы хотите.
Допустим, у вас есть задача, которую вы хотите, чтобы этот робот выполнил. Это может быть что угодно, от жонглирования 6 пылающими бензопилами до помощи жертве инсульта в выполнении упражнений или выпечки яблочного пирога. Это может быть ключом к концепции вашей прибыльной роботизированной компании или просто полезным поведением, помогающим вам по дому. Что бы это ни было внутри вашего мозга, , скрытое в вашем уме , есть политика , которая, если ее передать роботу, заставит его выполнять задачу именно так, как вы этого хотите. Проблема передачи задачи от вашего разума роботу — это то, что мы называем «Передача политики человека-робота» (HRPT). И есть несколько разных подходов к нему.
Телеуправление
Первый и, как правило, самый простой способ заставить робота что-то делать — это прямое телеуправление. То есть человек непосредственно управляет роботом для выполнения задачи. Вам понадобится соответствующий метод управления роботом, который может быть чем угодно, от набора джойстиков до телеметрического костюма для всего тела. Вам также понадобится человек, возможно, вы (или платный эксперт), чтобы управлять роботом, или, может быть, даже целая команда людей, каждый из которых по-разному управляет своей частью робота.
Какой бы ни была система управления, идея состоит в том, что люди сами реализуют политику управления. То есть человек наблюдает за состоянием робота либо напрямую, либо через датчики, а затем сообщает роботу, как использовать его приводы (такие как манипуляторы, фрезы, подъемники и т. д.) для выполнения задачи. При телеуправлении, хотя некоторые низкоуровневые системы (например, баланс) могут быть автоматизированы, все решения на высоком уровне принимаются человеком.
Дистанционное управление имеет множество преимуществ. Прежде всего, это избавит вас от необходимости выяснять, как четко сформулировать свои цели; то есть политика может оставаться в вашем сознании в скрытом виде. Эта функция очень помогает, если политика довольно сложная. Если учесть усилия, которые могут потребоваться для программирования робота для выполнения сложной многоэтапной задачи, становится ясно, что простое управление роботом самостоятельно может выполнить работу быстрее.
Кроме того, при наличии человека в петле адаптация к меняющейся среде может выполняться немедленно. Кроме того, поскольку решения принимает человек, на юридические и этические вопросы ответственности и ответственности ответить легче. Прекрасным примером телеоперации для HRPT является использование хирургических роботов, где точность и масштаб робота хорошо используются сложной – и невыраженной – политикой управления внутри головы человека-хирурга.
Роботизированная хирургическая система DaVinci компании Intuitive Surgical.
Однако дистанционное управление как подход HRPT также имеет множество недостатков. Главный из них заключается в том, что, поскольку люди постоянно должны быть связаны с телеуправляемыми роботами, на самом деле это не реализует мечту о разработке автономных роботов. Телеуправляемый робот не освобождает людей от работы и не позволяет одному человеку увеличить свою эффективность и стать таким же продуктивным, как 10 человек. (Однако это позволяет людям избегать опасных ситуаций, в чем иногда и заключается весь смысл.)
Точно так же, поскольку человек, по сути, все еще выполняет работу с телеуправлением, все недостатки и проблемы людей проявляются. Например, телеоператоры устают и отвлекаются, опаздывают или просто совершают ошибки — все то, чего мы ожидаем (возможно, неправильно), чтобы наши роботы не делали.
В качестве инструмента первого прохода телеуправление прекрасно, поскольку оно доказывает, что задача, которую вы хотите, чтобы ваш робот выполнял, на самом деле может быть выполнена роботом. Полезно знать, что аппаратное обеспечение робота физически способно выполнять ту задачу, которую вы от него хотите, до того, как вы попытаетесь разработать для него политику автономного управления.
Телеуправление роботом Mahru в режиме реального времени, разработанным в Корейском институте науки и технологий.
Кроме того, если вы ограничитесь только использованием информации датчиков робота во время телеуправления, вы можете доказать, что задача решается роботом. То есть робот имеет доступ к достаточному количеству информации, чтобы фактически определить, что делать в ответ на поток его датчиков. Опять же, это очень полезно знать, прежде чем тратить часы/недели/месяцы/годы на попытки заставить робота выполнять задачу самостоятельно.
Итак, допустим, вы доказали, что задача, которую должен выполнить ваш робот, на самом деле может быть решена и выполнена этим удивительным телом робота, и теперь вы хотите, чтобы робот выполнял эту задачу сам. Большой! Как ты собираешься это сделать? Вероятно, со вторым основным подходом к HRPT.
Явное программирование
Правильно. Вы сядете и попытаетесь — ясно и подробно, на вашем любимом языке программирования — расписать, что робот должен делать , как он должен реагировать на окружающую среду, чтобы выполнить задание.
Программирование LEGO(R) MINDSTORMS(R) EV3.
Честно говоря, рассмотрение всех возможных ситуаций, которые потенциально могут произойти, пока ваш робот занимается своими делами, заняло бы слишком много времени (в конце концов, их бесконечное множество, и даже люди, которым платят за придумывание странных ситуаций, пропускают кучу). Таким образом, вы, вероятно, сделаете некоторые предположения о том, какие ситуации вряд ли возникнут, и проигнорируете их в своем коде. Сделай вам действительно нужно подумать, что произойдет, если ваш робот наткнется на комбинацию инвалидной коляски/утки/метлы?
Даже если не учитывать маловероятные сценарии, требуется много работы, чтобы запрограммировать робота на выполнение чего-либо, кроме самых основных задач, в самых разных контекстах. На самом деле, при заданном уровне усилий по программированию (скажем, в месяц) по мере увеличения сложности задачи дисперсия среды, в которой можно запрограммировать работу, снижается.
Конечно, легко закодировать простую задачу (проехать по квадрату) для выполнения в самых разных условиях (разные поверхности пола/комнаты). Примерно так же легко запрограммировать сложную задачу (накрыть на стол) в одном конкретном окружении (все тарелки/посуда и столы/стулья в фиксированных, известных местах). Но программировать сложную задачу для различных условий (сервировка стола на любой кухне) намного, НАМНОГО сложнее. Все эти усилия (проектирование, архитектурное проектирование, кодирование, отладка и тестирование) на самом деле могут оказаться намного более трудоемкими, чем простое выполнение задачи самостоятельно.
Программное обеспечение для моделирования и автономного программирования от Staubli Robotics.
Так зачем пытаться заставить робота самостоятельно выполнять сложные задачи? Потому что, как только ваша программа заработает — «если она заработает», — робот сможет выполнять задачу снова, и снова, и снова. Если повезет, вы окупите свои усилия в долгосрочной перспективе.
Почти все автономные роботы, с которыми вы, вероятно, взаимодействовали до сих пор (за исключением демонстраций в исследовательских лабораториях), прошли через этот процесс. Они были тщательно написаны командой разработчиков для выполнения определенных задач в ограниченных средах. Измените один параметр (например, высоту ступени) за пределы ограниченного диапазона, и вся система рухнет, как робот, пытающийся ходить.
Обучение
Третий основной подход к HRPT заключается в использовании обучения: робот должен понять, как выполнять задачу, анализируя данные.
В настоящее время существует множество различных типов машинного обучения с использованием множества различных технологий, но все они пытаются достичь одной и той же цели: найти шаблоны в данных, полезные для выполнения желаемой задачи. Задачей может быть идентификация кота на изображении, предсказание фондового рынка или определение политики управления для робота. Когда дело доходит до HRPT, это именно то, что нам нужно.
Концептуально простой способ научить робота выполнять задачу состоит в том, чтобы сообщить ему, какова цель задачи, и позволить роботу поэкспериментировать, чтобы выяснить, как достичь этой цели. Это обучение с подкреплением (RL), где робот получает вознаграждение, когда задача выполнена (или платит штраф, когда задача НЕ выполнена) и пытается понять, как использовать свои возможности, чтобы добраться до цели. Само вознаграждение генерируется функцией вознаграждения , которая сопоставляет состояние робота (или пары состояние-действие робота) с тем, насколько хорошо (или плохо) для робота находиться в этом состоянии (или выполнять это действие в этом состоянии) .
Награждающие роботы обычно не выглядят так.
С одной стороны, RL может быть действительно простым в использовании, так как конечное состояние или желаемая цель часто легко описываются. Когда все, что имеет значение, — это простое конечное состояние, функцию вознаграждения легко написать: Если на моей тарелке есть омлет, +1000, иначе 0.
С другой стороны, чтобы найти путь к желаемому концу- состоянии, роботу, возможно, придется исследовать все возможные конфигурации, в которых может находиться он и окружающий мир (его пространство состояний ) и все возможные действия, которые он может выполнять (его пространство действий ) в каждом из этих состояний. Если пространства состояний и действий большие, роботу может потребоваться очень и очень много времени, чтобы найти ЛЮБОЙ путь к цели, не говоря уже об оптимальном. Но для ограниченных ситуаций с небольшими пространствами состояний и ограниченными пространствами действий (например, моделируемые системы в сетевом мире) RL часто может привести к надежным и оптимальным политикам управления.
Одним из способов ограничения проблем с RL в больших пространствах является предоставление дополнительных вознаграждений, например, за достижение роботом промежуточных состояний на пути к цели. Или разработчик может определить эвристику, чтобы вести робота к более подходящему для задачи поведению. К сожалению, предоставление этих типов информации делает функцию вознаграждения более сложной и трудной для записи, и может приблизиться к сложности явного программирования.
Обучение… на демонстрации
Другой подход к обучению обходит сложные части RL, просто позволяя людям предоставить роботу полезные примеры или демонстрации того, что он должен делать для выполнения желаемой задачи. Этот подход называется Обучение на демонстрации (LfD) или, иногда, Программирование на демонстрации (PbD).
Часть программы обучения на демонстрациях на конференции Ассоциации содействия развитию искусственного интеллекта 2011.
LfD только предполагает, что вы, человек, можете выполнить задачу, которую вы хотите, чтобы робот сделал. Интересно, что одной из наиболее распространенных форм демонстраций является дистанционное управление роботом при выполнении задачи. Использование телеопераций в целях роботизированного обучения прекрасно использует преимущества этого метода HRPT, а именно доказательство возможности выполнения задачи роботом.
Другой формой создания демонстраций является прямое кинестетическое манипулирование , когда робот физически управляется с выполнением задания, что снова доказывает работоспособность. К сожалению, этот подход (а также дистанционное управление) может оказаться трудным, когда у робота много степени свободы (представьте себе 2 руки, каждая с 7 суставами, а также ноги, шея и т.д.).
Когда Rethink Robotics все еще разрабатывала роботов, они были очень ясны — их роботы «обучаются, а не программируются», в данном случае путем прямого кинестетического манипулирования.
Очень востребованный подход LfD заключается в том, чтобы робот просто наблюдал за тем, как человек сам выполняет задачу. Если вы можете решить задачу о соответствии (какие части человека соответствуют каким частям робота), 9Наблюдение 0793 может быть чрезвычайно мощным способом сбора демонстрационных данных.
Сильвен Калинон демонстрирует роботизированное обучение посредством наблюдения.
Допустим, у вас есть несколько хороших демонстраций того, как должно выполняться задание. Что дальше?
Просто заставить робота воспроизвести демонстрацию недостаточно, так как обычно не гарантируется, что мир будет вести себя точно так же, как раньше. Таким образом, вместо этого многие методы LfD строят модель демонстрационных данных, фиксируя как ожидаемое поведение и допустимое отклонение вокруг него. Один из распространенных подходов состоит в том, чтобы взять демонстрации, деформировать их всех, чтобы они были одинаковой продолжительности во времени, а затем построить динамическую модель того, как состояние робота меняется с течением времени. Вы даже можете гарантировать стабильность системы, накладывая на нее различные ограничения. Эти системы можно использовать для некоторых довольно крутых вещей, например, для игры в мини-гольф.
Тем не менее, общая проблема с LfD заключается в том, что политика усвоенного контроля часто ограничивается тем, чтобы быть не хуже человека-демонстратора. Другой подход, названный Inverse Reinforcement Learning (IRL) предназначен для объединения демонстрационного подхода LfD с возможностями оптимизации RL.
В этом семействе методов вместо того, чтобы полагаться только на политику управления, полученную непосредственно из демонстраций, система сначала пытается оценить лежащую в их основе функцию вознаграждения. Используя как функцию вознаграждения, так и политику начального контроля, основанную на демонстрациях, системы IRL могут оптимизировать выполнение задач. В конце концов, такая система даже может выполнять задачу лучше, чем сами люди! Классическим примером этого является проект Stanford Autonomous Helicopter.
Цель проекта Стэнфордского университета состояла в том, чтобы продвигать передовые достижения в автономном полете вертолета: экстремальный пилотаж под управлением компьютера.
Я мог бы продолжать и продолжать, так как в области LfD очень много интересных работ. Есть работа, направленная на обнаружение многократно используемых поднавыков из демонстраций, поэтому можно выполнять новые, разные задачи. И есть работа, направленная на предоставление обратной связи человеку во время процесса обучения, чтобы он мог генерировать более полезные данные для обучения. И еще есть моя собственная работа, в которой я рассматривал, как определить, когда существует несколько правильных способов достижения цели, или как извлечь полезную информацию из неудачных попыток демонстрации, вместо того, чтобы предполагать, что человек всегда может выполнить задачу правильно.
Каким бы захватывающим это ни было, обучение как решение HRPT все же имеет недостатки. Основная проблема, как и в любой системе обучения, заключается в том, как гарантировать ограничения поведения робота. С помощью прямого телеуправления или явного программирования вы можете с некоторой долей уверенности сказать, что робот-дворецкий никогда не подсыплет вам горчицу в кофе (за исключением проблем с восприятием или очень усталого или злонамеренного телеоператора-человека).